機(jī)器人的拾放操作���,數(shù)字化產(chǎn)線設(shè)計(jì)及仿真(PROCESS SIMULATE)干貨分享
饒等
發(fā)布于2021-09-27 10:20
22
2
標(biāo)簽:機(jī)器人,智能制造,案例學(xué)習(xí)
 【免費(fèi)下載】PLC軟件下載_PLC軟件安裝教程_PLC手冊(cè)下載_PLC案例下載!
【免費(fèi)下載】PLC軟件下載_PLC軟件安裝教程_PLC手冊(cè)下載_PLC案例下載!
【免費(fèi)學(xué)習(xí)】 變頻器精品課程_西門子PLC精品教程_三菱PLC精品教程��!
拾取與放置操作作為機(jī)器人最基本的運(yùn)動(dòng)操作����,我們?cè)撊绾巫屃慵ㄟ^傳輸帶來到機(jī)器人旁邊,我們又該如何讓機(jī)器人準(zhǔn)確地抓取零件并放到合適的位置上呢?
第一步:設(shè)置根目錄和新建研究
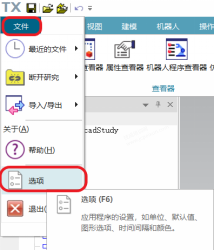
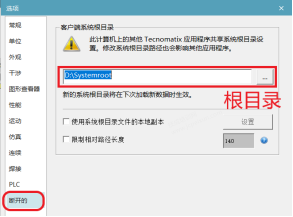
1.打開軟件��,點(diǎn)擊文件�����,點(diǎn)擊選項(xiàng) 2.點(diǎn)擊斷開的���,看到根目錄的路徑
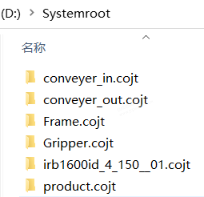
3.把這些文件復(fù)制到我們的根目錄下
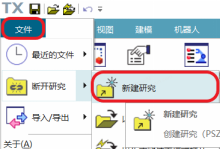
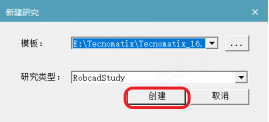
4.打開軟件����,點(diǎn)擊文件����,點(diǎn)擊新建研究���,點(diǎn)擊創(chuàng)建,點(diǎn)擊確定��。
第二步:插入組件
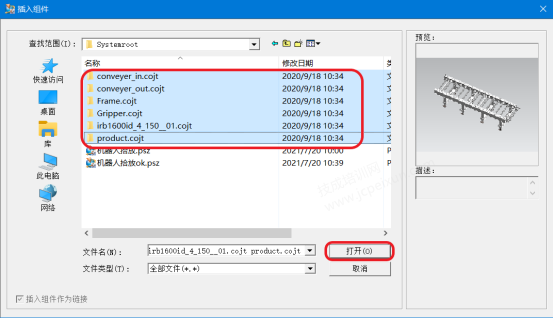
1.點(diǎn)擊建模���,點(diǎn)擊插入

2.在根目錄里選擇以下文件�����,然后點(diǎn)擊確定�����。
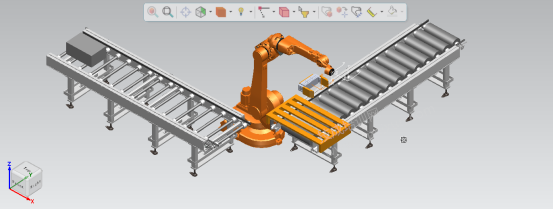
打開之后如圖所示:
第三步:安裝工具
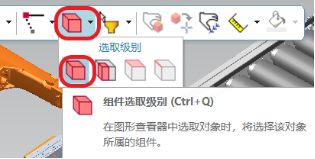
1.選擇組件選取級(jí)別
2.右擊機(jī)器人�,點(diǎn)擊安裝工具

3.點(diǎn)擊抓手
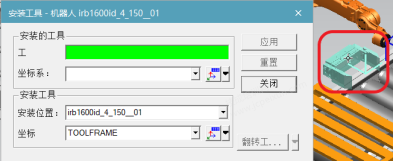
4.點(diǎn)擊應(yīng)用
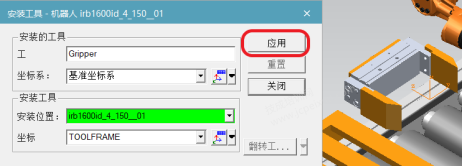
5.完成之后如下圖所示:
6.驗(yàn)證是否安裝成功:右擊機(jī)器人�����,點(diǎn)擊機(jī)器人調(diào)整�,移動(dòng)坐標(biāo),機(jī)器人跟隨運(yùn)動(dòng)證明安裝成功,點(diǎn)擊重置��,機(jī)器人恢復(fù)初始位置�����,點(diǎn)擊關(guān)閉���。

第四步:新建對(duì)象流操作
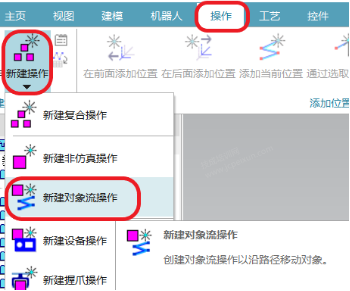
1.點(diǎn)擊操作,點(diǎn)擊新建操作��,點(diǎn)擊新建對(duì)象流操作
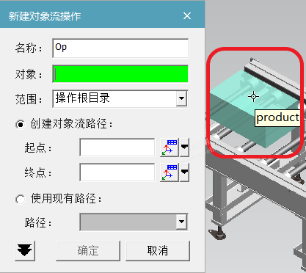
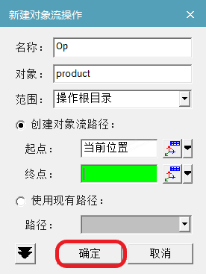
2.在對(duì)象里��,點(diǎn)擊product�����,起點(diǎn)選擇當(dāng)前位置��,終點(diǎn)不進(jìn)行選擇��,點(diǎn)擊確定
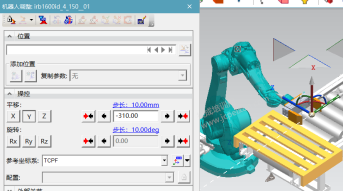
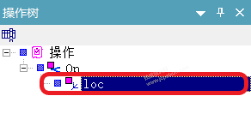
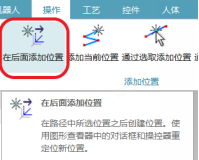
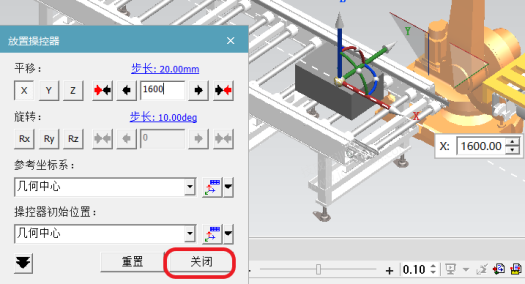
3.在操作樹里�,點(diǎn)擊loc,接著在操作里��,點(diǎn)擊后面添加位置,接著向x軸移動(dòng)1600����,再點(diǎn)擊關(guān)閉
第五步:創(chuàng)建機(jī)器人拾取與放置的坐標(biāo)
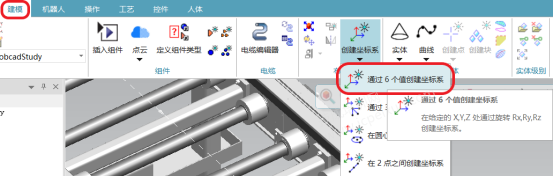
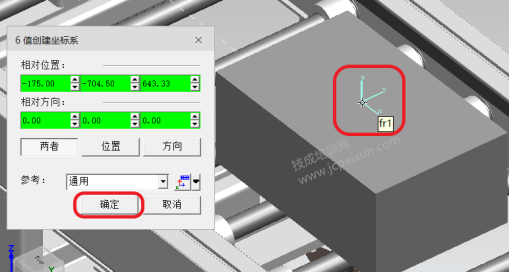
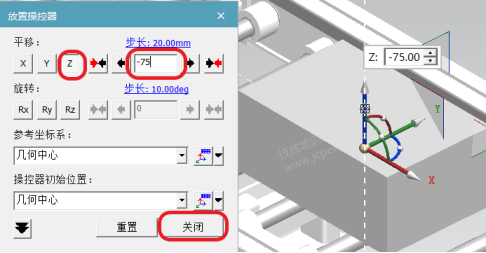
1.點(diǎn)擊建模,點(diǎn)擊通過6點(diǎn)建立坐標(biāo)系�,點(diǎn)擊product上面的中心點(diǎn),點(diǎn)擊確定創(chuàng)建機(jī)器人拾取坐標(biāo)fr1���,接著選擇fr1��,點(diǎn)擊放置操控器��,將fr1沿z的負(fù)方向移動(dòng)75���,點(diǎn)擊關(guān)閉(為了把fr1設(shè)置在product的幾何中心,它的高為150�,中間即75)
2.同樣的方法,我們新建機(jī)器人放置坐標(biāo)系fr2
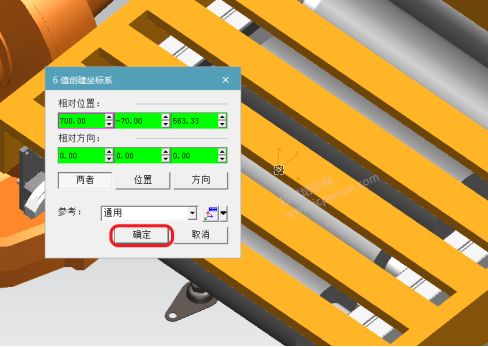
3.接著點(diǎn)擊fr2����,點(diǎn)擊放置操控器,把fr2向z軸正方向移動(dòng)75�����,點(diǎn)擊關(guān)閉

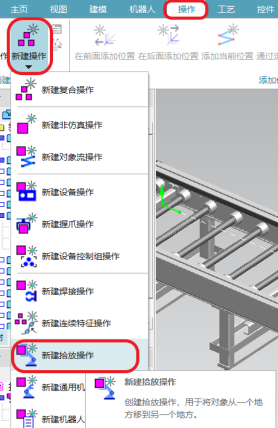
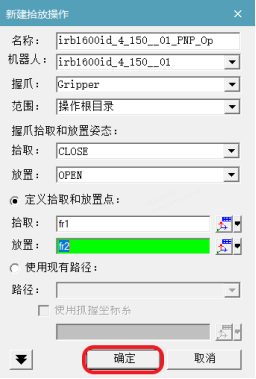
第六步:新建機(jī)器人拾取操作
1.點(diǎn)擊操作,點(diǎn)擊新建操作���,點(diǎn)擊新建拾放操作�����,機(jī)器人選擇irb1600id_4_150__01,拾取選擇fr1�����,放置選擇fr2���,然后點(diǎn)擊確定��。
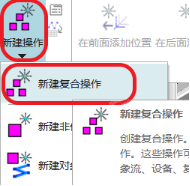
第七步:新建復(fù)合操作并設(shè)置當(dāng)前操作
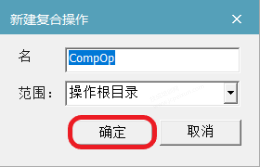
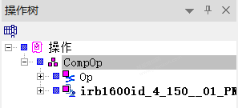
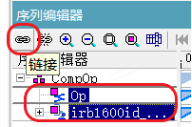
1.點(diǎn)擊操作����,點(diǎn)擊新建復(fù)合操作���,點(diǎn)擊確定����,并將Op和irb1600id_4_150__01_PNP_Op
拖進(jìn)CompOp,并右擊CompOp��,點(diǎn)擊設(shè)置當(dāng)前操作

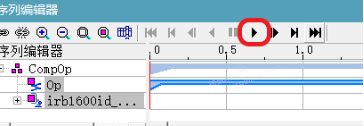
2.在序列編輯器里��,選中兩個(gè)操作��,點(diǎn)擊鏈接���,最后點(diǎn)擊播放��,彈出播放前需重置仿真位置����,點(diǎn)擊確定即可�����,然后就可以看到從頭到尾的一個(gè)對(duì)象流和機(jī)器人的拾取與放置操作了
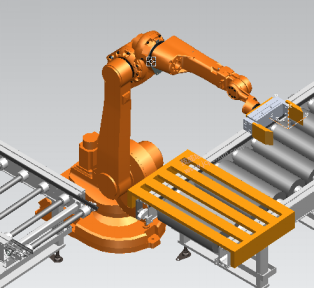
最后的仿真畫面如下圖所示:
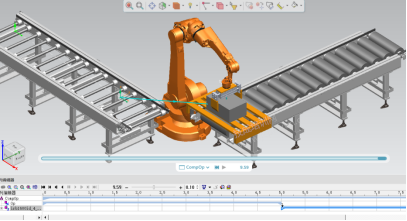
到這里�����,一個(gè)粗糙的機(jī)器人拾放操作仿真就完成了�。至于為什么說是粗糙的,其實(shí)細(xì)心的同學(xué)會(huì)發(fā)現(xiàn)這個(gè)機(jī)器人的抓手是以閉合的姿態(tài)直接穿過物體再抓取的�,理想的情況應(yīng)該是抓手在靠近物體時(shí)就先打開抓手����,并且不發(fā)生穿透物體的行為靠近物體再以閉合的姿態(tài)夾緊物體拾取到另一個(gè)位置�。這就是后面我們要講的干涉檢查和路徑優(yōu)化了。在后面會(huì)和大家具體講解�。
(技成培訓(xùn)網(wǎng)原創(chuàng),作者:姚璇���,未經(jīng)授權(quán)不得轉(zhuǎn)載�,違者必究)
|

電工精品教程
立即掃碼免費(fèi)學(xué)習(xí)
|

電工題庫寶典
立即掃碼免費(fèi)下載
|

超全PLC學(xué)習(xí)資料包
立即掃碼免費(fèi)下載
|

故障查詢小程序
立即掃碼免費(fèi)使用
|
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























