KUKA機(jī)器人零點(diǎn)標(biāo)定
饒等
發(fā)布于2021-05-12 16:13
13
1
標(biāo)簽:機(jī)器人,智能制造,零點(diǎn),
 【免費(fèi)下載】電工仿真軟件_電工學(xué)習(xí)手冊_電工電子書
【免費(fèi)下載】電工仿真軟件_電工學(xué)習(xí)手冊_電工電子書
【免費(fèi)學(xué)習(xí)】PLC熱門課程_PLC初級_PLC基礎(chǔ)_PLC中高級_軟件安裝
【免費(fèi)下載】PLC軟件下載_PLC軟件安裝教程_PLC手冊下載_PLC案例下載!
【免費(fèi)學(xué)習(xí)】 變頻器精品課程_西門子PLC精品教程_三菱PLC精品教程����!
在實(shí)際的工作現(xiàn)場中�,我們經(jīng)常會碰到零點(diǎn)丟失(如圖1-1)的情況。一旦零點(diǎn)丟失了機(jī)器人就無法運(yùn)行程序����,為了讓機(jī)器人正常運(yùn)行,不耽誤生產(chǎn)���。那么此時我們就需要零點(diǎn)校準(zhǔn)�����,那么針對KUKA機(jī)器人的零點(diǎn)校準(zhǔn)我們有哪些方法呢?在哪種情況下需要校準(zhǔn)呢?我們一起來聊聊吧���。

圖1-1
1.為什么要標(biāo)定零點(diǎn)?
1).零點(diǎn)標(biāo)定時,會給每個機(jī)器人軸分派一個基準(zhǔn)值。就好比用一桿秤去稱東西���,我們需要先把秤調(diào)到零位值��,才能稱的更準(zhǔn)確���。
2).這樣機(jī)器人控制系統(tǒng)可識別到軸位于何處。機(jī)器人軸在哪一個角度(比如30°)���,那么它參考點(diǎn)是零點(diǎn)位置��。
3).僅在工業(yè)機(jī)器人得到充分和正確標(biāo)定零點(diǎn)時�,它的使用效果才會最好���。
4).只有這樣機(jī)器人才能達(dá)到它最高的點(diǎn)精度和軌跡精度���。
5).可以執(zhí)行程序。只有進(jìn)行零點(diǎn)標(biāo)定后才能運(yùn)行程序����。
2.何時標(biāo)定零點(diǎn)?
原則上﹐機(jī)器人必須時刻處于已標(biāo)定零點(diǎn)的狀態(tài)。在以下情況下必須進(jìn)行零點(diǎn)標(biāo)定:
1).在將機(jī)器人投入運(yùn)行時
2).在對參與定位值感測的部件(例如帶分解器或RDC的電機(jī))采取了維護(hù)措施之后�����。
3).當(dāng)未用控制系統(tǒng)(例如借助于自由旋轉(zhuǎn)裝置)移動了機(jī)器人軸時。
4).在機(jī)械維修/出現(xiàn)問題之后﹐根據(jù)不同的要求進(jìn)行零點(diǎn)標(biāo)定或負(fù)載零點(diǎn)標(biāo)定�,并應(yīng)用測得的偏差。
一更換齒輪箱后
-以高于250 mm/s的速度撞到一個終端止擋上之后-在碰撞后
3.零點(diǎn)的標(biāo)定方式有哪些?
KUKA機(jī)器人零點(diǎn)標(biāo)定的方式有用千分表(如圖2-1)和EMD(如圖2-2)電子元器件��,千分表的標(biāo)定方式精度不高����,使用EMD標(biāo)定的方式精度較高,操作也相對簡單���。

圖2-1

圖2-2
4.使用EMD進(jìn)行KUKA 機(jī)器人零點(diǎn)標(biāo)定方法����,為用戶提供了兩種方法(如圖3-1):1.標(biāo)準(zhǔn)方法 2.零點(diǎn)標(biāo)定����,帶負(fù)載校正
1)標(biāo)準(zhǔn)方法:通常在以下幾種場合使用:
1.機(jī)器人初次出廠沒有裝任何工具
2.機(jī)器人只裝一個工具且不會拆卸換成其他工具
3.機(jī)器人的定位精度相對較低
2)零點(diǎn)標(biāo)定�,帶負(fù)載校正方法:通常在以下幾種場合使用
1.機(jī)器人安裝多個工具且會來回切換(比如機(jī)器人裝有多個點(diǎn)焊鉗)
2.機(jī)器人定位精度較高時

圖3-1
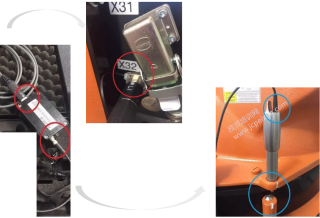
5. SEMD/MEMD 校準(zhǔn)組件介紹


6.下面介紹“標(biāo)準(zhǔn)方法”零點(diǎn)標(biāo)定
1).將機(jī)器人移到預(yù)零點(diǎn)標(biāo)定位置

2). 將MEMD/ SEMD螺接并連接到測量筒上。一端連在機(jī)器人X32位置�����,一端連在機(jī)器人軸校準(zhǔn)位置
3)菜單路徑:機(jī)器人按鍵>投入運(yùn)行>零點(diǎn)標(biāo)定>EMD >標(biāo)準(zhǔn)>執(zhí)行零點(diǎn)校正

4).執(zhí)行零點(diǎn)校正窗口。選擇需要校準(zhǔn)的軸�����,點(diǎn)擊校正�。
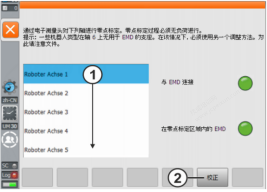
5). 進(jìn)行零點(diǎn)標(biāo)定運(yùn)行。
·用零點(diǎn)標(biāo)定按鍵(2)啟動零點(diǎn)標(biāo)定運(yùn)行���。
·在信息窗口中顯示信息需要啟動鍵�。

6). 按下確認(rèn)開關(guān)和啟動鍵

7). 最后���,執(zhí)行啟動后�����,校準(zhǔn)完了�,機(jī)器人故障信息(如圖4-1)將消失����。

圖4-1
結(jié)束語:庫卡機(jī)器人的零點(diǎn)標(biāo)定步驟相對比較多,但是只要按照步驟一步一步完成就可以解決丟零點(diǎn)問題����。大家快去試試吧�。
(技成培訓(xùn)網(wǎng)原創(chuàng)����,作者:郭彪,未經(jīng)授權(quán)不得轉(zhuǎn)載����,違者必究)
|

電工精品教程
立即掃碼免費(fèi)學(xué)習(xí)
|

電工題庫寶典
立即掃碼免費(fèi)下載
|

超全PLC學(xué)習(xí)資料包
立即掃碼免費(fèi)下載
|

故障查詢小程序
立即掃碼免費(fèi)使用
|
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























