【實(shí)操圖】步進(jìn)電機(jī)系統(tǒng)的學(xué)習(xí)分析
高天宇
發(fā)布于2018-08-09 18:14
19
0
標(biāo)簽:步進(jìn)電機(jī)
步進(jìn)系統(tǒng)包括脈沖發(fā)生器PLC����、單片機(jī)�、步進(jìn)驅(qū)動器、步進(jìn)電機(jī)��。
1����、步進(jìn)電機(jī),是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蛘呔€位移的開環(huán)元件���。在非超載的情況下�����,電機(jī)的轉(zhuǎn)速取決于發(fā)脈沖的頻率和細(xì)分?jǐn)?shù)�����。
發(fā)脈沖頻率直接影響速度�,頻率越大���,速度越大�����,當(dāng)然不能太大����,力矩會不足,并且電機(jī)速度過快會丟步和抖動
細(xì)分?jǐn)?shù)�,比如1.8度的電機(jī),走一步旋轉(zhuǎn)1.8度���,一圈360度�,那么需要200步��。如果不細(xì)分�,我一秒發(fā)200個脈沖就可以走一圈。現(xiàn)在我設(shè)定細(xì)分為2����,即一圈需要200*2為400步。我仍保持那個頻率一秒200個脈沖���,這時(shí)一秒只能走半圈��。細(xì)分越大�,控制定位越精確,速度也會相應(yīng)變低��,這個時(shí)候只能提高脈沖發(fā)生頻率����。
電機(jī)的停止位置取決于發(fā)的脈沖數(shù)目�����。
在細(xì)分?jǐn)?shù)不改變的情況下是這樣����。發(fā)的脈沖越多,電機(jī)動作時(shí)間越長�����。如果改變細(xì)分的話��,如上面所分析一樣�,會對位移有影響�����。
綜上兩點(diǎn)�,調(diào)試時(shí)首先要確定脈沖細(xì)分?jǐn)?shù)����,以達(dá)到對位置的精確控制����。對于速度��,我們可以通過加大頻率來給予補(bǔ)償。但是����,在某些情況下����,電機(jī)已經(jīng)不能正確響應(yīng)PLC給定的頻率時(shí),需要調(diào)小細(xì)分以達(dá)到一個適中狀態(tài)�����。
2、步進(jìn)電機(jī)的工作原理
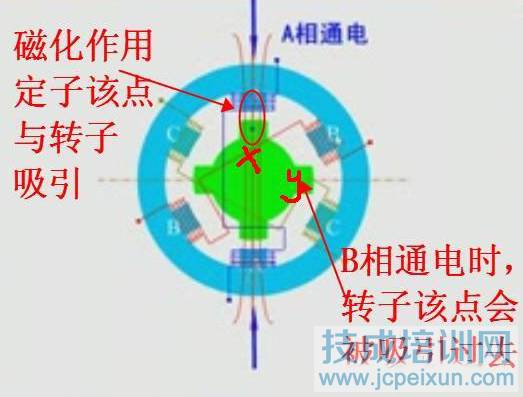
步進(jìn)電機(jī)工作實(shí)際上是電磁鐵的作用
當(dāng)某相定子勵磁后����,它吸引轉(zhuǎn)子,轉(zhuǎn)子的齒與該相定子磁極上的齒對應(yīng)����。這時(shí)�����,轉(zhuǎn)子轉(zhuǎn)動一個角度��。當(dāng)換一相得電時(shí),轉(zhuǎn)子又轉(zhuǎn)動一個角度���。就這樣不斷輪流通電�,轉(zhuǎn)子不停地轉(zhuǎn)動。
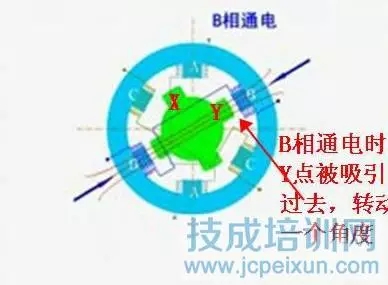
從圖可以看出�,電機(jī)的運(yùn)行方向與我們通的AB電的相序有關(guān)���。而電機(jī)的速度就與我們切換AB電的頻率有關(guān)��。當(dāng)然�,這是一個模型圖����,定子繞組ABC不只有這么三組,可以依次排列很多組�����,6組��,9組���,12組��,不同的磁極數(shù)���,這就行成了不同的步距角�。
有一個概念��,步距角�����,每轉(zhuǎn)一步的角度��,這與電機(jī)定子繞組相數(shù)�����,轉(zhuǎn)子齒數(shù)��,電機(jī)結(jié)構(gòu)有關(guān)�。我們不需要深究���,拿到一個電機(jī)�����,只需要知道是幾相電機(jī)�����,步距角多少���,電壓電流多少即可����。
3��、關(guān)于步進(jìn)驅(qū)動器
步進(jìn)驅(qū)動器����,從步進(jìn)電機(jī)的轉(zhuǎn)動原理可以看出,要使步進(jìn)電機(jī)正常運(yùn)行����,必須按規(guī)律控制步進(jìn)電機(jī)的每一組繞組得電。步進(jìn)驅(qū)動器接收外部的信號是方向信號DIR和脈沖信號CP�。
如果驅(qū)動器需要5V的控制信號,而我們只有24V電源���,這時(shí)需要串聯(lián)一個2K電阻���。(24V-5V)/10ma=2K
4��、步進(jìn)驅(qū)動器的設(shè)置
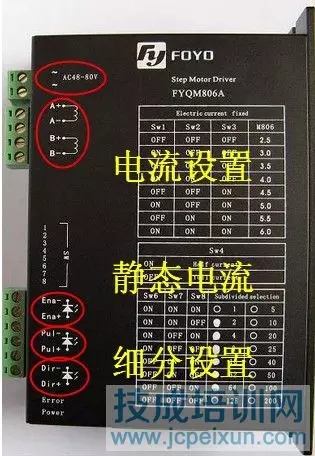
A�,電流設(shè)置
根據(jù)步進(jìn)電機(jī)的工作電流�,去調(diào)驅(qū)動器輸出電流。電流越大����,力矩越大。
B�����,靜態(tài)電流設(shè)置
一般有25%��,50%�,75%,100%等不同的劃分����。意思是在停止?fàn)顟B(tài),驅(qū)動器給步進(jìn)電機(jī)多大的電流去抱死它����,持續(xù)給哦。這個百分比是大輸出的百分比���。在對于提升類負(fù)載���,這個就有用了,靜態(tài)時(shí)需要做功支撐重力�。所以會調(diào)的比較大。對于水平類負(fù)載�����,停止?fàn)顟B(tài)時(shí)��,轉(zhuǎn)子不會被拖轉(zhuǎn)的情況下�,這個值一般調(diào)得就比較小。
C����,細(xì)分設(shè)置
為了達(dá)到精確定位控制的有效途徑。前面已經(jīng)說過了���,不贅述�。
原創(chuàng): 陳勝
本文為原創(chuàng)內(nèi)容,如需轉(zhuǎn)載請注明出處����!
課程推薦:
步進(jìn)電動機(jī)應(yīng)用技術(shù)
電工基礎(chǔ)
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























