傳送帶操作控制
肖菲
發(fā)布于2024-04-15 16:31
606
57
標(biāo)簽:PLC程序,位邏輯指令,傳送帶案例
位邏輯指令是在編寫程序使用最多的一種指令���,下面通過一個案例理解位邏輯指令的使用����。 (超多PLC案例課程免費(fèi)看��,點(diǎn)擊即可跳轉(zhuǎn))
(一)示例控制要求描述
一條傳送帶輸送灌裝物品至某一個位置�����,在末端有一光柵檢測傳感器���,但感應(yīng)到后��,傳送帶停止運(yùn)行�����。具體要求如下:
1) 該傳送帶有手自動兩種模式運(yùn)行�,每種模式均要在系統(tǒng)啟動運(yùn)行后才有效。
2) 選擇對應(yīng)的模式�,并按下模式確認(rèn)按鈕后,對應(yīng)的模式指示亮����;此時方可進(jìn)行相關(guān)的控制操作。
3) 在手動模式時�,可進(jìn)行點(diǎn)動電機(jī)正反轉(zhuǎn)運(yùn)行。
4) 在自動模式時��,電機(jī)運(yùn)行之前�,自動傳輸指示燈閃爍����;當(dāng)傳感器感應(yīng)到物品,此時按下自動啟動按鈕����,電機(jī)運(yùn)行,自動傳輸指示燈常亮�,運(yùn)行至被光柵檢測傳感器動作時,電機(jī)停止運(yùn)行����;自動傳輸指示燈閃爍�。當(dāng)物品感應(yīng)到后需要再次按下自動啟動按鈕��,才能繼續(xù)運(yùn)行����。
(二)I/O地址定義
根據(jù)控制要求描述的分析,可建立如表1所示的I/O地址分配表
|
符號名稱
|
地址
|
符號名稱
|
地址
|
|
自動啟動
|
I0.0
|
點(diǎn)動正轉(zhuǎn)
|
I1.0
|
|
系統(tǒng)停止
|
I0.1
|
系統(tǒng)指示
|
Q0.0
|
|
系統(tǒng)啟動
|
I0.2
|
手動模式指示
|
Q0.1
|
|
物料檢測
|
I0.3
|
自動模式指示
|
Q0.2
|
|
手自動切換
|
I0.4
|
自動傳輸指示
|
Q0.3
|
|
模式確認(rèn)
|
I0.5
|
電機(jī)反轉(zhuǎn)
|
Q0.4
|
|
光柵檢測到物料
|
I0.6
|
電機(jī)正轉(zhuǎn)
|
Q0.5
|
|
點(diǎn)動反轉(zhuǎn)
|
I0.7
|
|
|
(三)接線圖
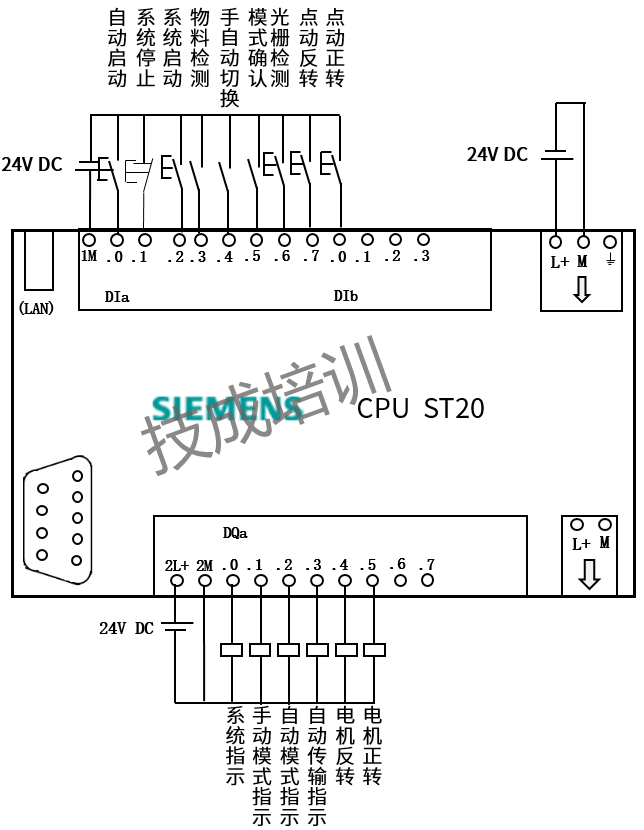
(四)程序設(shè)計思路及參考程序
本案例可根據(jù)不同的功能做成多個子程序�����,根據(jù)控制要求執(zhí)行相應(yīng)的子程序進(jìn)行控制�����;建立自動模式���、手動模式�����、及系統(tǒng)和模式選擇三個子程序進(jìn)行調(diào)用�。
參考程序如下:
(1) 模式選擇子程序
先是編寫系統(tǒng)啟停程序,但系統(tǒng)停止后�����,所有的輸出均復(fù)位
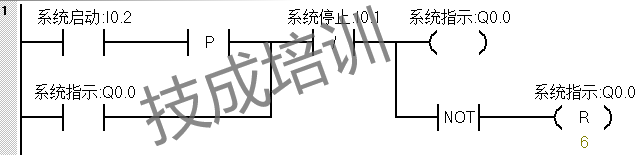
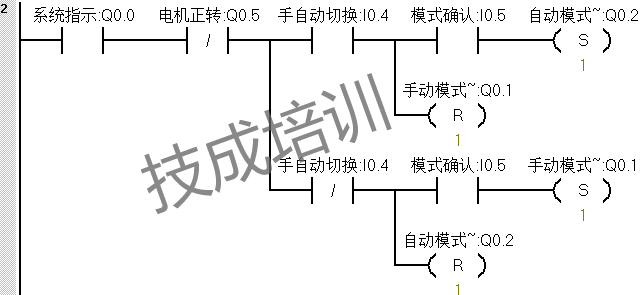
當(dāng)系統(tǒng)運(yùn)行后����,系統(tǒng)指示燈亮,此時可以進(jìn)行模式切換�,默認(rèn)為手動模式。需要注意的是當(dāng)電機(jī)正轉(zhuǎn)時����,無法進(jìn)行模式切換。在電機(jī)非正轉(zhuǎn)狀態(tài)�����,選擇對應(yīng)模式后按模式確認(rèn)鍵��,對應(yīng)模式指示燈常亮����,程序如下:
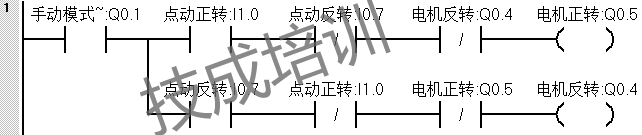
(2) 手動模式控制子程序
選擇手動模式并進(jìn)行模式確認(rèn)后可以電機(jī)進(jìn)行正反轉(zhuǎn)點(diǎn)動控制���;程序如下圖所示�。
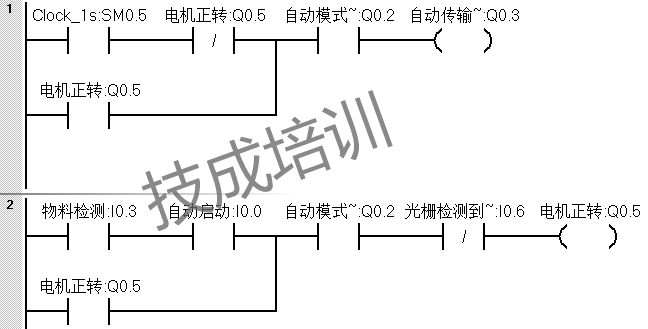
(3) 自動模式子程序
選擇自動模式并進(jìn)行模式確認(rèn)后自動傳輸指示燈閃爍,當(dāng)檢測傳感器器檢測到物品后����,按下自動啟動按鈕,電機(jī)正轉(zhuǎn)�����,自動傳輸指示燈常亮�����,物品碰到光柵檢測感應(yīng)器時��,電機(jī)停止����;程序如下圖所示。
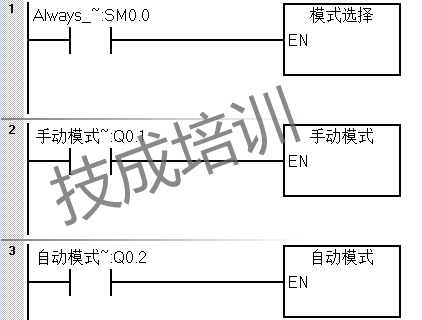
(4) 主程序調(diào)用子程序
各個功能的子程序編寫完成后�,即可在MAIN主程序中進(jìn)行對各個子程序調(diào)用,程序如下:
來源:技成培訓(xùn)網(wǎng)�,作者:技成-眭相建,未經(jīng)授權(quán)不得轉(zhuǎn)載�!
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























