PLC基礎(chǔ)知識(shí):PID控制原理詳解及作用分析詳解
王曾
發(fā)布于2023-04-12 09:57
116
21
標(biāo)簽:PLC���,PID
在我們實(shí)際工作經(jīng)常會(huì)用到PID控制系統(tǒng)��,但是對這個(gè)PID到底是什么�?該如何調(diào)節(jié)����,我們相信大家都比較頭痛,現(xiàn)在我們就用大白話的方式給大家講講PID����。
①PID應(yīng)用場景:
其實(shí)不管是在自動(dòng)化行業(yè)還是在生活中,我們都或多或少的會(huì)接觸PID����。比如空調(diào)系統(tǒng)����、定速循環(huán)系統(tǒng)�����、恒壓供水系統(tǒng)(如圖1)上都可以見到PID的影子���。在這些系統(tǒng)中�����,最大的一個(gè)特點(diǎn)就是我們需要設(shè)定一個(gè)我們想要的數(shù)據(jù)�,然后設(shè)備就根據(jù)我們的設(shè)定�����,自動(dòng)進(jìn)行調(diào)節(jié)�。比如:在恒壓控制系統(tǒng)中,設(shè)定一個(gè)壓力(10MPa),那么這個(gè)系統(tǒng)就需要穩(wěn)定在我設(shè)定的壓力值10MPa左右�����;在空調(diào)系統(tǒng)中,我們設(shè)定好了一個(gè)溫度(26℃)之后���,我們當(dāng)然希望室內(nèi)的溫度就一直穩(wěn)定在26℃左右嘛。在我們設(shè)定好了參數(shù)之后�,設(shè)備如何自動(dòng)調(diào)節(jié)呢?就是通過PID功能進(jìn)行調(diào)節(jié)的�!

圖1:PID應(yīng)用場景圖
②PID控制系統(tǒng)
在PID各參數(shù)的作用之前,我們先宏觀來了解一下PID控制系統(tǒng)�。如圖2所示,一個(gè)完整的PID系統(tǒng)中主要由以下幾部分組成:給定環(huán)節(jié)�、控制器、執(zhí)行機(jī)構(gòu)����、被控對象、反饋環(huán)節(jié)����。

圖2:PID控制系統(tǒng)圖
我們逐個(gè)來說明每個(gè)環(huán)節(jié)的作用。為了說明這些環(huán)節(jié)的作用����,我們舉一個(gè)生活的例子:現(xiàn)在我們接到一個(gè)任務(wù),需要騎一輛自行車沿著直線走1000米�����。那么直線走1000米就是“給定環(huán)節(jié)”了,因?yàn)槲翌A(yù)先就知道了需要走多少米距離并且走的是直線���。騎車的是“人”����,人由大腦控制�����,那么大腦就是“控制器”了���,大腦不能直接控制車輛��,然后大腦發(fā)命令的方式去控制我們的手和腳從而控制自行車����,那么手和腳就是“執(zhí)行機(jī)構(gòu)了”�����,而最終我們控制的是自行車�,那么自行車就是“被控對象”了�����。那么在騎車的過程中�,可能會(huì)出現(xiàn)一陣風(fēng)或者路上出現(xiàn)石頭或者坑等�,那么這些石頭或者坑呢,就是“擾動(dòng)”����。我們在走直線的過程中����,到底有沒有沿著直線走呢?我們可以通過眼睛看�����,那么眼睛把自行車的信息收集起來(是否走歪了)��,這個(gè)過程就是“反饋環(huán)節(jié)”��。僅僅直到是否走歪了還不行���,需要及時(shí)調(diào)整���,如何如何調(diào)整呢��?就是通過預(yù)期設(shè)定(給定環(huán)節(jié))與實(shí)際路線(反饋環(huán)節(jié))相比較���,等到的差值進(jìn)行修正。
那么把生活中的這個(gè)例子應(yīng)用到工業(yè)中來����,其實(shí)是非常類似的。如圖3所示是:恒液位控制系統(tǒng)�����。我們通過觸摸屏設(shè)置水池里需要到達(dá)的液位高度����,當(dāng)PLC接到我們設(shè)置的命令之后,通過傳感器反饋實(shí)際的液位高度與我們設(shè)定的液位高度相比較���,得到差值�。如果低于我們設(shè)定的液位值��,則驅(qū)動(dòng)變頻器帶動(dòng)水泵往水池里加水�����,當(dāng)高于我們設(shè)定的液位值,變頻器則停止加水�。
③PID三個(gè)參數(shù)的作用
我們了解了PID控制系統(tǒng)是怎么回事之后,再來了解PID這三個(gè)參數(shù)的作用就會(huì)相對簡單了�����。首先我們從全局的眼光來看這個(gè)公式�,如圖3所示,
①u(t) :輸出曲線�,pid輸出值隨時(shí)間的變化曲線����。也就是最終輸出信號(hào)的大小。
②Kp:比例系數(shù)��。這個(gè)系數(shù)由人為給定�����,可以大也可以小����,我們要調(diào)節(jié)PID參數(shù)的話�����,Kp這個(gè)系數(shù)尤為重要����。
③e(t) :偏差�,設(shè)定值與實(shí)際值的偏差。
④Ti:積分時(shí)間�。
⑤Td:微分時(shí)間。

圖3:PID公式圖
在圖3這個(gè)公式中��,其中u(t)和e(t)是比較好理解的�����,剩下的就是Kp�、Ti、Td參數(shù)���,這三個(gè)參數(shù)正是我們需要人為調(diào)節(jié)的(當(dāng)然����,很多設(shè)備也有自動(dòng)調(diào)節(jié)的功能��,比如PLC就有自動(dòng)整定這三個(gè)參數(shù)的功能)。但是在這個(gè)公式中���,我們可以得到幾個(gè)結(jié)論����。第一個(gè)就是:當(dāng)e(t)為0則整個(gè)PID結(jié)果為0���,也就是偏差為0時(shí)����,PID沒有輸出���,從而說明了PID輸出一定是需要有偏差的�����。第二:P I D的結(jié)果等于u(t)
? 比例系數(shù):Kp
比例調(diào)節(jié)就是根據(jù)當(dāng)前的值與目標(biāo)值的差值,乘以了一個(gè)Kp的系數(shù)����,來得到一個(gè)輸出值,這輸出值直接影響了下次當(dāng)前值的變化��。公式為:U(t)=Kp*e(t)
舉例:
(1) 如圖4所示,有個(gè)水池,需要時(shí)刻保持1m的高度,目前水桶里有0.2m的水��。
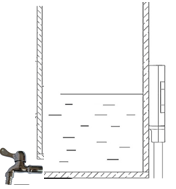
圖4:水池示意圖
那么采用P(比例)的方法加水:即每次測量與1m的誤差,并加入與誤差成比例的水量
比如設(shè)Kp=0.5
第一次,誤差是1-0.2=0.8m,那么加入水量是:Kp*0.8= 0.4mm
第二次,誤差是1-0.6 =0.4m那么加入水量是:Kp*0.4=0.2m�����。
按照此種方式�,我們加若干次水,然后繪制成表格(如圖5)及曲線圖(如圖6)�。我們可以看到加到了第8次水之后,基本上就沒有誤差��,基于誤差的輸出也只有0.00313���。而從圖6的曲線圖也可以看到����,從第6次開始�,水位基本上就是趨于穩(wěn)定的。那么��,這不正是我們想看到的結(jié)果嗎���?預(yù)期是需要保持1m的高度�����,加了8次水剛好就到了1m左右���。但是在實(shí)際的工程中���,可能是一邊放水,一邊往水池里加水�����。如圖4所示���,如果說有人把水池的水龍頭打開了一邊加水一邊放水�����,還是加8次水就剛好到了1m的位置嗎�����?
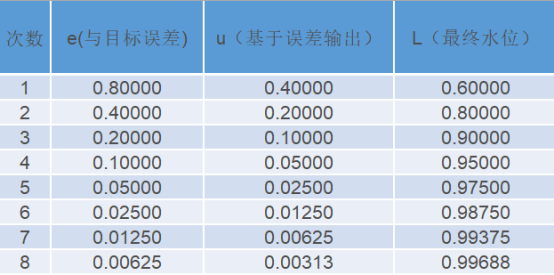
圖5
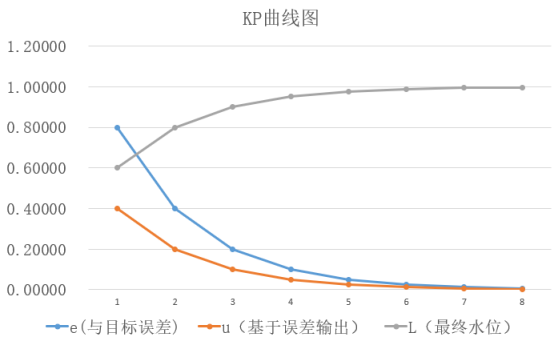
圖6
我們一起來分析一邊放水一邊加水的這種情況。有個(gè)水池下面安裝了水龍頭,仍需保持1m 的高度,目前水桶里有0.2m 的水,但每次加水都會(huì)流出0.1m�����。
我們?nèi)匀辉O(shè)Kp=0.5
第一次:誤差是 1-0.2=0.8m,那么加入水量是 Kp*0.8=0.4m.最終水位時(shí)是0.4 0.2-0.1=0.5
第二次:誤差是1-0.5 =0.5mm 那么加入水量是 Kp*0.5=0.25m,最終水位是0.5 0.25-0.1=0.65
我們按照這種方式推算,繪制成表格(如圖7)及曲線圖(如圖8)��。從表格和曲線中可以看到��,從第6次開始水位基本上穩(wěn)定在0.79左右�,也就是水再也上不去了,這其實(shí)也很好理解���,因?yàn)槊看渭拥乃炕旧系扔诹鞒龅乃浚?.1m)����,所以水位基本上就沒上升����,也沒下降。那么這種情況呢����,就叫做穩(wěn)態(tài)誤差,這也就是比例調(diào)節(jié)的不足��,需要積分參數(shù)來彌補(bǔ)。當(dāng)然����,有的人會(huì)提出,那是不是把Kp這個(gè)參數(shù)往大了調(diào)��,是不是就可以讓水時(shí)刻穩(wěn)定在1m的位置呢��?為了驗(yàn)證��,我們把Kp修改成2����,而不再是0.5了,那這個(gè)表格(如圖9所示)和曲線(圖10所示)���?���?梢钥吹奖壤刂埔肓朔€(wěn)態(tài)誤差,且無法消除�����。比例常數(shù)增大可以減小穩(wěn)態(tài)誤差,但如果太大則引起系統(tǒng)震蕩,不穩(wěn)定���。
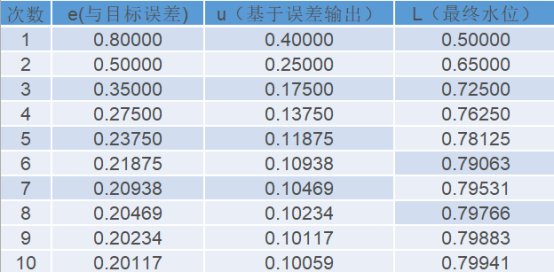
圖7
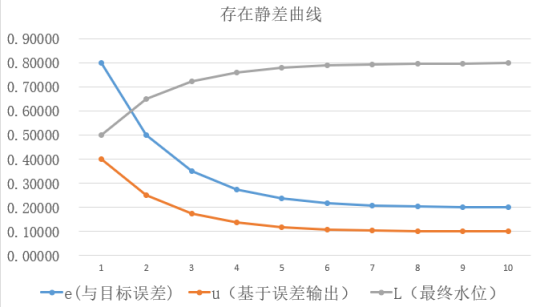
圖8
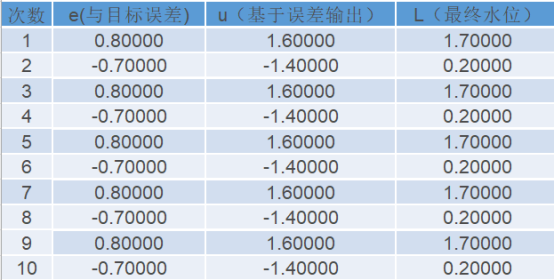
圖9
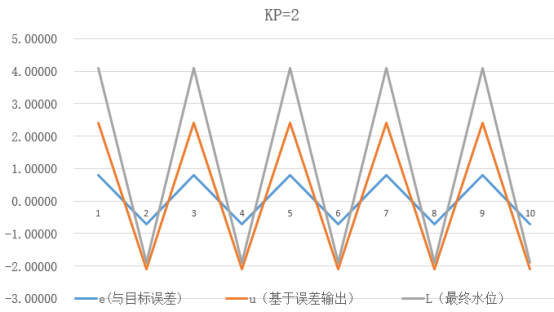
圖10
? 積分系數(shù):Ki
為了消除穩(wěn)態(tài)誤差, 加入積分,積分控制就是將歷史誤差全部加起來乘以積分常數(shù)�。公式為Ki*( e(1) e(2) e(3)……)���。e(1)代表的是第一次誤差�,e(2)代表的是第二次誤差�,依次類推。
還是先設(shè)Kp=0.5,Ki= 0.3
第一次: 誤差為0.8, 比例部分 Kp*0.8=0.4, 積分部分 Ki*(e(1))= 0.24,加入水量u為0.4 0.24=0.64���,最終水位0.2 0.64-0.1= 0.74m��。
第二次: 誤差為0.26,比例部分Kp * 0.26=0.13,積分部分Ki*(e(1) e(2))= 0.318,加入水量u為 0.13 0.318=0.448���,最終水位: 0.74 0.448-0.1=1.088m。將推算的數(shù)據(jù)繪制成表格(如圖11)及曲線圖(如圖12)��。從表格及曲線圖可以看到��,水位第一次到第5次水是有些波動(dòng)���,但是隨著積分項(xiàng)發(fā)揮作用����,水位逐漸趨于穩(wěn)定在1m左右。這就完美解決了比例項(xiàng)的弊端(存在穩(wěn)態(tài)誤差)�����。
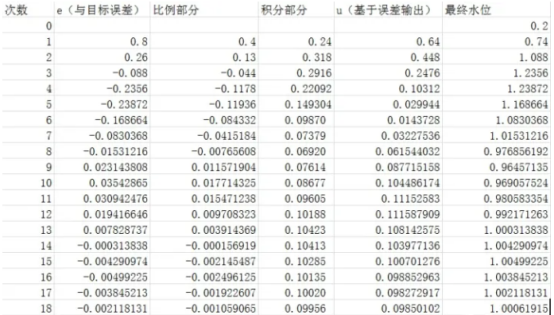
圖11
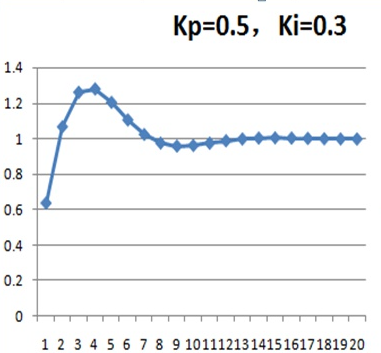
圖12
最后���,還是微分參數(shù)沒有寫出來�,那如果假如微分項(xiàng)�����,你覺得這個(gè)PID輸出曲線是如何變化的呢�?點(diǎn)擊免費(fèi)試學(xué)PID相關(guān)教程
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























