PLC控制程序設(shè)計方法有哪些
林建平
發(fā)布于2023-01-05 10:17
32
2
標(biāo)簽:PLC
(1)邏輯代數(shù)設(shè)計方法
邏輯代數(shù)設(shè)計方法仿照數(shù)字電子技術(shù)中的邏輯設(shè)計方法進(jìn)行PLC梯形圖程序設(shè)計�����,其基本思路是使用邏輯表達(dá)式描述實際問題�����,從而獲得邏輯表達(dá)式����,根據(jù)邏輯表達(dá)式設(shè)計梯形圖�����。以走廊燈兩地控制程序為例����,燈的控制輸出可表示為:
YO=XO·X1 XO·X1
基于該表達(dá)式��,很容易編寫出梯形圖����。在實際工程中����,單純的條件控制系統(tǒng)相當(dāng)于組合邏輯電路,表達(dá)式書寫簡單���,對開關(guān)量的控制過程可用邏輯代數(shù)式表示、分析和設(shè)計����。由此可見,邏輯代數(shù)設(shè)計法在各種開關(guān)量控制系統(tǒng)中非常實用����。邏輯代數(shù)設(shè)計法的一般步驟如下:
①根據(jù)控制要求列出邏輯代數(shù)表達(dá)式。
②對邏輯代數(shù)式進(jìn)行化簡��。
③設(shè)計1/O編址表�����,并根據(jù)化簡后的邏輯表達(dá)式設(shè)計梯形圖程序。
(2)流程圖設(shè)計法
PLC采用計算機控制技術(shù)�,其程序設(shè)計同樣可遵循軟件工程設(shè)計方法,即PLC控制程序及其運行過程可以流程圖來表示���。但是���,由于PLC基于掃描工作原理,PLC程序的流程圖設(shè)計法與計算機程序流程圖設(shè)計法略有不同���,從整體上看�,PLC程序始終是一個循環(huán)結(jié)構(gòu)�����,即不斷地進(jìn)行輸入刷新�、程序掃描和輸出刷新。流程圖設(shè)計法的一般步驟如下:
①畫出控制系統(tǒng)流程圖�����。
②設(shè)計I/O編址表��。
③根據(jù)流程圖,設(shè)計梯形圖���。
(3)順序功能圖設(shè)計法
如果系統(tǒng)的動作或工序存在明顯的先后關(guān)系或順序關(guān)系��,一般可采用順序功能圖設(shè)計法�����,簡稱 SFC設(shè)計法�。其基本步驟如下:
①根據(jù)工作任務(wù)設(shè)計控制系統(tǒng)的動作順序圖或狀態(tài)圖或節(jié)拍表��,找出狀態(tài)發(fā)生轉(zhuǎn)換的條件�����。
②設(shè)計I/O編址表��。
③將狀態(tài)流程圖翻譯成梯形圖�����。
如果有SFC編程環(huán)境��,可以直接使用SFC進(jìn)行編程�,設(shè)計系統(tǒng)的SRC程序��,此時不必轉(zhuǎn)換成相應(yīng)的梯形圖控制程序。
(4)Petri網(wǎng)設(shè)計法
1962年�����,德國的C.A.Petri博士提出了Petri網(wǎng)理論���,主要用于并發(fā)���、離散系統(tǒng)的建模。經(jīng)過多年的發(fā)展�,該理論已在復(fù)雜PLC程序設(shè)計中獲得了廣泛應(yīng)用。Petri網(wǎng)包括的兩種要素稱為位置(S元素)和變遷(T元素)�,它們分別表示系統(tǒng)的狀態(tài)和變化。每個位置所包含的令牌(Token)數(shù)可表示出系統(tǒng)狀態(tài)�����,通過Token的流動來演變控制觸發(fā)的規(guī)則���?;赑etri網(wǎng)設(shè)計PLC控制系統(tǒng)時���,Petri網(wǎng)理論主要用來構(gòu)建控制器的邏輯關(guān)系���,借助于Petri網(wǎng)導(dǎo)出邏輯表達(dá)式��、從而設(shè)計出PLC控制程序����。
向小車運輸路線")
下面以自動導(dǎo)向小車運輸系統(tǒng)為例�����,介紹基于Petri網(wǎng)設(shè)計PLC控制程序的基本步驟和方法���。小車的行走路線如圖5-4所示�����,本系統(tǒng)有2個下料工作站 O1 和 O2����,3個上料工作站 I1���、I2 和I3。圖中圓圈表示的觸點用來檢測小車在一段路程結(jié)束時的狀況,小車每到達(dá)1個觸點�,控制系統(tǒng)必須決定是停下等待還是繼續(xù)行駛為避免撞車,將傳送網(wǎng)絡(luò)劃分為若干段���,在任意給定時刻�����,每1段上不能多于1輛小車����。在本系統(tǒng)中���,假設(shè)上料站11向下料站O1供料:上料站12向下料站O2供料;上料站13既可向下料站O1供料�����,又可向下料站O2供料����。由此可見�,從3個上料站發(fā)出的小車對同一段路的使用具有競爭性,當(dāng)2輛小車同時請求使用時����,就產(chǎn)生了競爭����。為了避免小車相撞�����,必須使用并發(fā)型設(shè)計思想�。即在每個觸點處,哪輛小車先到達(dá)觸點��,就將下一段路的使用權(quán)交給這輛小車���,而只有當(dāng)這輛小車離開這段路后���,這段路的使用權(quán)才能交給其他的小車。通過在每輛小車上裝備轉(zhuǎn)向控制裝置�����,可控制每輛小車在岔路口的轉(zhuǎn)向����。
向小車運輸")
基于上述思想,構(gòu)建的自動導(dǎo)向小車運輸系統(tǒng)的Petri網(wǎng)如圖5-5所示�。具有競爭性質(zhì)的資源,即每一段路備用1個位置元素S來表示����,當(dāng)沒有小車在路上行駛時,其S元素內(nèi)部包含1個Token�。圖5-5中,1i為第i個上料站上料標(biāo)志(輸入信號);Pji為小車i在j路段上的行駛狀況;Sj 為路段j空著的標(biāo)志;T為小車i離開j路段時的觸發(fā)標(biāo)志(輸入信號)����。圖5-5的Petri網(wǎng)模型給出了4種可能的行車順序:
H1→O1,12→O2��,13→O1��,13→O2�����。系統(tǒng)中不同的小車在不同的路段上可以同時運行��。通過分析所構(gòu)造的Petri網(wǎng)����,可以寫出該自動導(dǎo)向系統(tǒng)的邏輯方程:
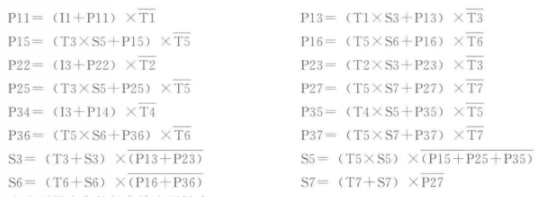
由此可得小車的行車輸出邏輯為:
小車1的行車控制輸出:OUT11=P11 P13 P15 P16
小車2的行車控制輸出:OUT12=P22 P23 P25 P27
小車3的行車控制輸出:OUT13=P34 P35 P36 P37
轉(zhuǎn)向輸出邏輯為:
小車1轉(zhuǎn)向控制輸出:OUT21=P16
小車2轉(zhuǎn)向控制輸出:OUT22=P26
小車3轉(zhuǎn)向控制輸出:OUT23=P36 P37
針對具體的PLC編寫梯形圖時�,只需使用具體的軟元件替換表達(dá)式中的各變量即可寫出梯形圖���。例如���,可將上料觸點信號11~13分配為X0~X2,路段位置觸點信號T1~T7分配為X3~X11��,行車控制輸出OUTl1~OUT13分配為Y0~Y2�����,轉(zhuǎn)向控制輸出OUT11~OUT13分配為Y3~Y5;Si和Pij用M取代��。根據(jù)上述邏輯關(guān)系�,即可寫出自動導(dǎo)向小車運輸系統(tǒng)的梯形圖控制程序。
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























