作為一個電氣人�����,你知道工業(yè)視覺是什么��?
高天宇
發(fā)布于2019-08-08 11:40
31
0
標(biāo)簽:工業(yè)視覺
VBAI全稱叫Vision Builder for Automated Inspection��,是VBAI推出的一款視覺檢查軟件產(chǎn)品���,VBAI稱其為用于自動檢測的視覺生成器����。同KEYENCE、OMRON��、PANASOVBAIC等智通系統(tǒng)有些類似���。
VBAI��,該程序是一個可以獨立運行的程序�,不需要依托LabVIEW�����,但是可以將寫好的VBAI程序生成LabVIEW代碼����。VBAI的編程和操作界面同Vision Assistant相似,可以部署到遠程目標(biāo)設(shè)備如CVS和SmartCamera上運行�。
VBAI的界面類似Vision Assistant,如下圖:
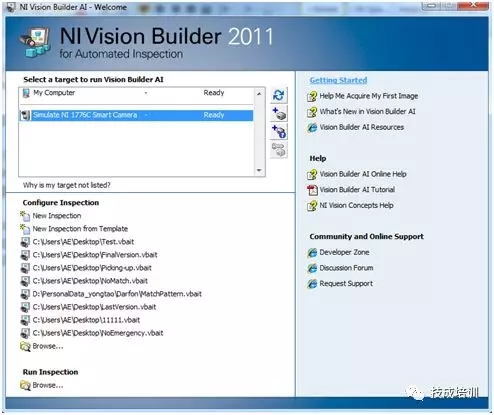
作為一款視覺軟件��,VBAI大的特點在于其獨立運行的能力和實時終端的可部署性����,其功能強大�,涵蓋了幾乎所有VDM所具有的功能����,而在其基礎(chǔ)上提供了豐富的與外部通信的接口,包括DIO接口��、串口以及USB接口����,并且通過以太網(wǎng)實現(xiàn)數(shù)據(jù)的交互和傳輸(例如:通過FTP將實時采集到的圖片存儲到上位機)。
應(yīng)用VBAI����,基本上不需要編程,只需要選擇合適的功能函數(shù)(Step/VI)�����,配置好參數(shù)�����,就可以完成許多測試���。此工具是實驗室進行快速視覺效果驗證的理想工具�,也是生產(chǎn)線實現(xiàn)簡易測試的理想測試平臺��。由此�����,技成特意推出
●技成培訓(xùn)網(wǎng)推出
●學(xué)習(xí)平臺:技成培訓(xùn)網(wǎng)
●課程類型:錄播精品課
●上課形式:在線學(xué)習(xí)
本課程深入淺出地對VBAI軟件進行詳細介紹��、并對鏡頭����、光源選型,此外還介紹了產(chǎn)品主要使用的通信功能�����。
課程大綱
章:工業(yè)視覺系統(tǒng)的認(rèn)知與選型?
1)工業(yè)視覺簡介及應(yīng)用
2)相機選型
3)鏡頭選型
4)光源選型
5)綜合工業(yè)視覺案例講解
第二章:瓶蓋視覺檢測的編程與調(diào)試?
1)導(dǎo)入圖像
2)灰度測量函數(shù)
3)模板匹配函數(shù)
4)瓶蓋視覺檢測的編程
第三章:氣缸墊片距離視覺檢測編程與調(diào)試?
1)兩點標(biāo)定
2)標(biāo)定板標(biāo)定
3)九點標(biāo)定
4)幾何測量函數(shù)設(shè)置
5)綜合案例講解
第四章:保險絲視覺檢測的編程與調(diào)試?
1)邊緣函數(shù)應(yīng)用
2)卡尺函數(shù)應(yīng)用與配置
3)邏輯函數(shù)應(yīng)用與配置
4)保險絲程序調(diào)試
第五章:兩相機視覺測定長度的編程與調(diào)試?
1)邊緣找點函數(shù)的方法
2)圖像化編程函數(shù)的使用
3)圖像化編程函數(shù)的使用
4)綜合案例講解
第六章:自動檢測手機參數(shù)的編程與調(diào)試?
1)讀取驗證字符
2)一維碼
3)二維碼
4)綜合案例講解
第七章:MOS引腳檢測?
1)掌握設(shè)置變量函數(shù)的功能
2)數(shù)組函數(shù)
3)自定義覆蓋函數(shù)
4)掌握狀態(tài)圖
5)綜合案例講解
第八章:串口和TCP通訊?
1)掌握調(diào)試工具的功能
2)串口通訊
3)TCP通訊
第九章:VIBA與ABB機器人通訊?
1)NI上的TCP設(shè)置
2)ABB的socket(TCP)設(shè)置
3)服務(wù)端和客戶端在TCP中的區(qū)別
4)VBAI與ABB機器人貼合
不難看出�����,這門課程專業(yè)性比較強����,本次講解將會把以下重難點知識作為授課重點和目標(biāo)����,旨在幫助每一個學(xué)員切實認(rèn)識并熟練運用VBAI
課程重難點
1:當(dāng)下流行的視覺軟件
2:視覺的應(yīng)用場合
3:相機選型方法
4:鏡頭選型方法
5:光源選型方法
6:導(dǎo)入圖像的方式���。
7:灰度測量函數(shù)的使用�����。
8:模板匹配函數(shù)的參數(shù)���。
9:標(biāo)定的方法
10:幾何測量函數(shù)設(shè)置
11:兩點標(biāo)定
12:九點標(biāo)定
13:邊緣函數(shù)的設(shè)置
14:邏輯函數(shù)的設(shè)置
15:卡尺函數(shù)的設(shè)置
16:圖像化簡單編程函數(shù)的設(shè)置方法
17:理解木板項目中的37cm的計算方法
18:能進行其他物品的測量
19:能讀取手機LOGO
20:能讀取條形碼中的內(nèi)容
21:能讀取二維碼手機的型號信息
22:變量的設(shè)置及更新
23:掌握狀態(tài)圖
24:數(shù)組操作
25:串口通訊原理
26:TCP通訊原理
27:Socket套接字用法
28:視覺與機器人貼合
本門課程是為視覺集成及應(yīng)用工程師生、機器人專業(yè)相關(guān)專業(yè)師生以及廣大電氣愛好者量身定制����,專業(yè)化教學(xué),本次授課老師也是電氣行業(yè)內(nèi)的電工及PLC高級技師��。
導(dǎo)師簡介
楊波
畢業(yè)于武漢大學(xué)�,從事機器人與視覺領(lǐng)域十余年��,現(xiàn)就職于深圳技師學(xué)院從事工業(yè)機器人教學(xué)工作���,電工高級技師����、PLC高級技師,曾獲得全國機械行業(yè)工業(yè)機器人比賽名�,被譽為育人標(biāo)兵、金牌教練
《工業(yè)視覺編程與調(diào)試》(點擊課程名稱�,立即學(xué)習(xí))
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























