帶原點位置的小車控制程序
王曾
發(fā)布于2023-02-24 16:45
132
2
標簽:PLC實操案例
一��、任務目標
該任務是位邏輯指令應用案例�����。西門子S7-1200 PLC的位邏輯指令處理對象為二進制位信號,主要包括觸點和線圈指令���、位操作指令及位檢測指令等���。本任務要求讀者掌握以下幾個內(nèi)容。
1.置位指令的使用
2.復位指令的使用
3.復位優(yōu)先指令的使用
二�����、任務描述
如圖2-3-1所示為帶原點位置的小車運行控制示意圖,該小車由三相異步電動機拖動�,通過三相異步電動機的正反轉(zhuǎn)控制來實現(xiàn)對小車的左行與右行。小車運行的控制要如下所示:
(1)系統(tǒng)上電后���,需要對小車進行回原點操作�,按下回原點啟動按鈕后小車開始回原點����,回原點過程先讓小車到達左限位,碰到左限位后返回����,當碰到原點后停止,則回原點結(jié)束����。
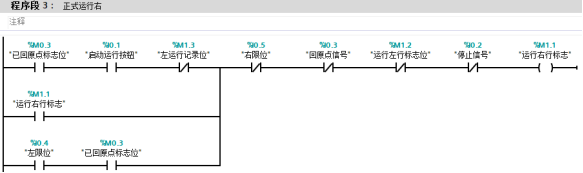
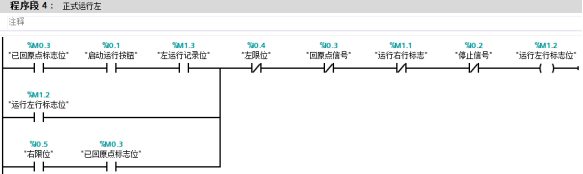
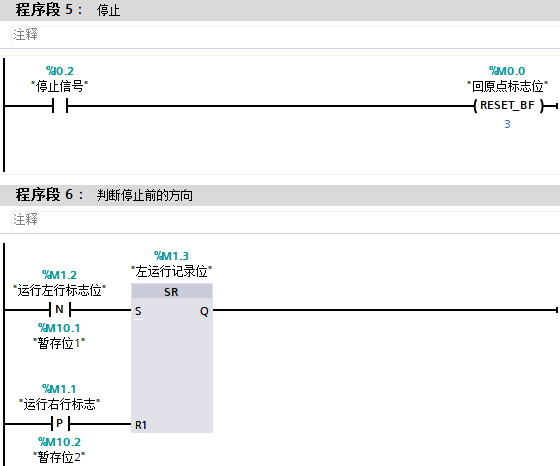
(2)在原點確定后,按下啟動運行按鈕���,小車向右運行�,碰到右限位后��,小車切換為左行���,碰到左限位后�����,小車切換回右行����,小車在左右限位之間往返運行。若按下停止按鈕����,小車停止運行,當再次按下啟動按鈕時�����,小車會以停止前的方向繼續(xù)運行�。
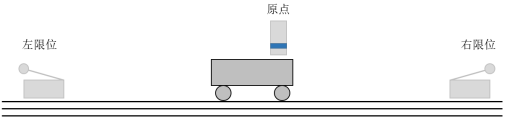
圖2-3-1 小車運行示意圖
三�、相關知識
本案例主要使用的是置位、復位���、復位優(yōu)先指令��,此處為讀者介紹指令的相關知識����。
1.置位與復位指令
S:置位指令將指定的地址位置位(變?yōu)?/span>1��,并保持)
R:復位指令將指定的地址位復位(變?yōu)?/span>0,并保持)
如圖2-3-2所示:置位/復位指令示例,當I0.0為1�,Q0.0為1���,之后����,即使I0.0為0,Q0.0保持為1,直到I0.1為1時�����,Q0.0變?yōu)?/span>0�。
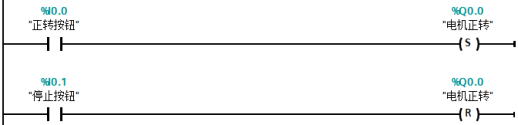
圖2-3-2 置位/復位指令示例
2.復位優(yōu)先指令
SR:復位優(yōu)先指令��,如圖2-3-3���。如果S輸入端的信號狀態(tài)為“1”,R1輸入端的信號為“0”則置位。如果S輸入端的信號為“0”��,R1輸入端的信號狀態(tài)為“1”�,則復位觸發(fā)器。如果兩個輸入端的RLO狀態(tài)均為“1”,則復位觸發(fā)器�����。如果兩個RLO狀態(tài)均為“0”,保持觸發(fā)器以前的狀態(tài)�����。用一個表格(表2-3-4)表示復位優(yōu)先指令的對應關系�����。
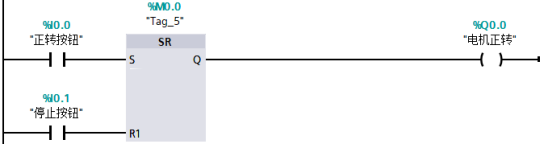
圖2-3-3 置位/復位示例
表2-3-4 SR復位優(yōu)先指令對應關系表
|
SR復位優(yōu)先指令
|
|
輸入狀態(tài)
|
輸出狀態(tài)
|
說明
|
|
S(I0.0)
|
R1(I0.1)
|
Q (Q0.0)
|
當各個狀態(tài)斷開后����,輸出狀態(tài)保持
|
|
|
1
|
0
|
1
|
|
|
0
|
1
|
0
|
|
|
1
|
1
|
0
|
|
四���、任務實施
本任務的實施步驟主要分為PLC接線��、IO地址分配以及程序設計思路:
1.PLC接線如圖2-3-5
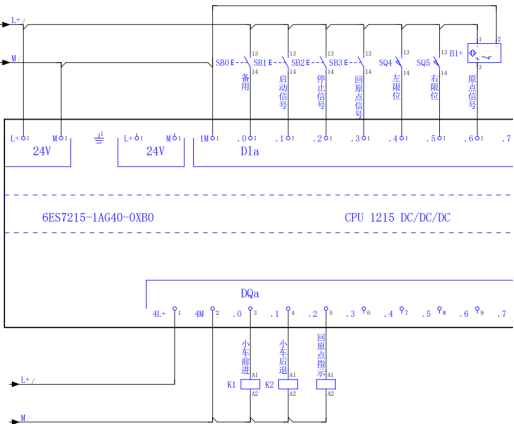
圖2-3-5 PLC接線圖
2.IO地址分配
|
輸入地址
|
說明
|
輸出地址
|
說明
|
|
I0.1
|
啟動信號
|
Q0.0
|
小車前進
|
|
I0.2
|
停止信號
|
Q0.1
|
小車后退
|
|
I0.3
|
回原點信號
|
Q0.2
|
回原點指示
|
|
I0.4
|
左限位
|
|
|
|
I0.5
|
右限位
|
|
|
|
I0.6
|
原點信號
|
|
|
3. 程序設計思路:
本任務中的動作可以看作為具有明顯的順序動作的程序�,因此可通過置位指令和復位指令來實現(xiàn)對下一個動作步的標志的置位和對上個動作標志的復位方法來實現(xiàn)順序動作。另外,任務中一個難點在于如何記錄停止前的狀態(tài),可以通過使用下降沿的方式來置位運行的標志位,當下次啟動時���,只需要判斷標志位的狀態(tài)就可知道停止前的狀態(tài)是如何的�����?
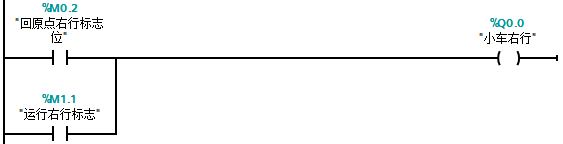
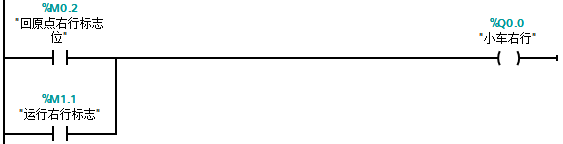
4.程序設計
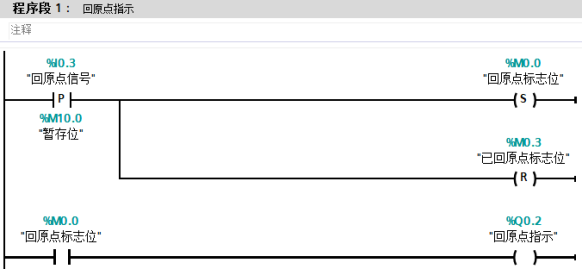
五、經(jīng)驗與總結(jié)
1.在這個任務中�����,主要是流程動作的控制�,到達了一個步驟之后切換為下一個步驟,讀者可以使用置位和復位的方式切換步序�����。
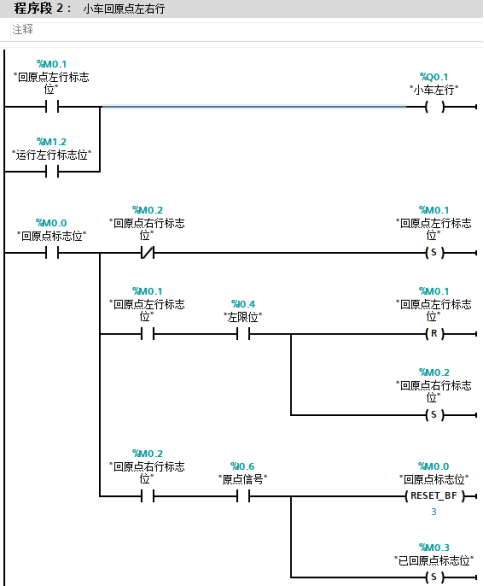
2.在編寫程序時��,若沒有思路��,也可以使用找條件的方法理清楚邏輯���,例如回原點過程:
小車回原點的條件為:按下了回原點啟動信號�。
下車回原點左行條件為:小車正在找原點�。
小車回原點左行停止條件為:小車找原點過程中到達左限位位置。
小車回原點右行條件為:小車正在找原點并且到達了左限位位置���。
小車回原點停止條件為:小車到達了原點���。
3.停止前的方向記錄使用一個標志位結(jié)合復位優(yōu)先指令標識小車停止前的方向��。
 技成工具箱
技成企業(yè)服務
技成工具箱
技成企業(yè)服務























