西門子S7-1200 PLC的PID功能組態(tài)詳解
王曾
發(fā)布于2023-04-19 09:48
160
2
標簽:西門子PLC
在我們實際工作經(jīng)常會用到PID控制系統(tǒng),比如控制恒壓供水設備��,恒溫加熱設備等����。這些設備使用PLC進行控制時�����,不僅僅需要編程,還需要設置相關參數(shù)(或者說組態(tài))�����。只有正確設置了相關參數(shù)之后��,程序編寫的才有意義���。那么今天我們以西門子1200PLC為例���,給大家講講如何組態(tài)PID功能。在組態(tài)之前����,要先判斷如何選擇PID指令,因為根據(jù)不同的應用場景選擇的PID指令不同�����,指令選擇的不同的話�����,組態(tài)也有一些區(qū)別�����。
①PID指令選擇:
S7-1200 PID 功能有三條指令可供選擇, 分別為 PID_Compact���, PID_3Step�, PID_Temp���,如圖1所示:
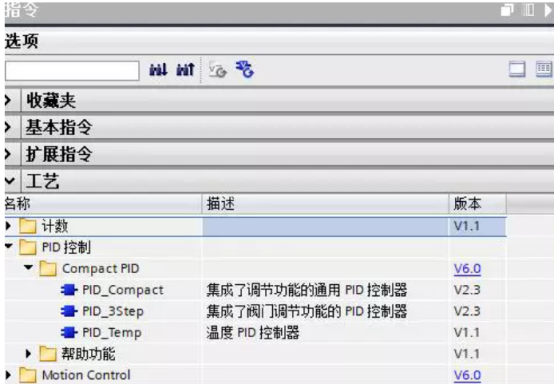
圖1:PID指令圖
第一步:先判斷是否使用三位執(zhí)行機構��,如果使用則選擇PID_3Step指令�。這里解釋一下三位執(zhí)行機構的特點:
(1)只接受開啟/關閉兩個數(shù)字量輸出控制;
(2)具有開到位/關到位的限位開關輸入信號���,或具有模擬量反饋位置信號�。
比如現(xiàn)場的一些電動閥門�,PLC控制電動閥門的正轉或者反轉從而控制流量、壓力等�����。PID_3Step指令(如圖2)控制兩個開關量的輸出�,比如一個為1��,一個為0,電動機可能是正轉��。一個0����,另外為1,電動機可能是反轉���。
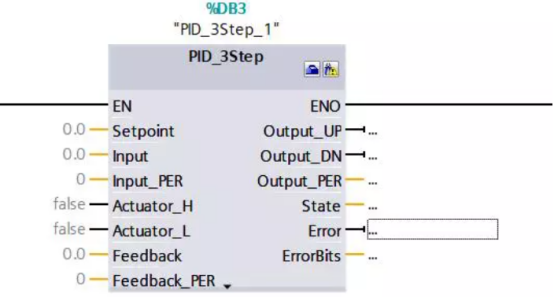
圖2:PID_3Step指令
第二步: 如果未使用三位執(zhí)行機構��,判斷是不是多回路�、串級控制����,如果是,則跳轉到第3步判斷�;如果不是,則跳轉到第4步�����。
第三步:判斷是不是需要加熱/制冷雙輸出(比如在空調系統(tǒng)中)�。如果需要,則調用PID_Temp指令,如圖3所示��。
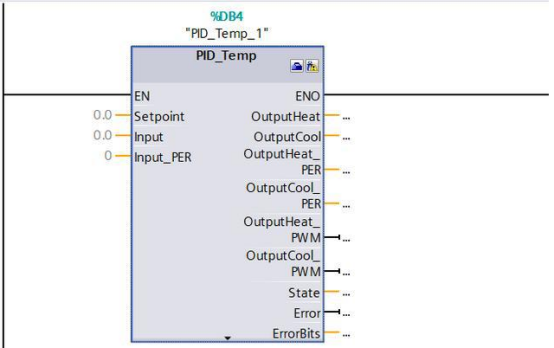
圖3:PID_Temp指令
第四步:判斷是不是需要溫度控制常用的附加功能(如控制帶�、死區(qū)等),如果不需要����,則調用PID_Compact,如圖4所示��。
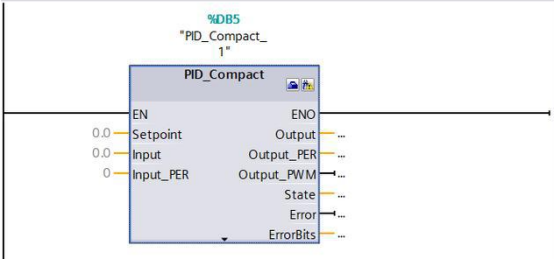
圖4 PID_Compact指令
這邊解釋一下“控制帶”及“死區(qū)”這兩個概念�。
控制帶:
在溫度控制具有明顯的大滯后特性,當過程值偏離設定值較大時調節(jié)過程過于緩慢����,而接近設定值時又容易出現(xiàn)較大超調。
存在上述兩種問題��,溫度控制必須滿足在偏差超過一定的范圍時��,輸出最大或者最小的調節(jié)量���,讓溫度值快速回到一個小的范圍中��,以縮短調節(jié)時間:在設定值附近時��,越靠近設定值����,調節(jié)量應越小���,以防止超調�����。為此�����,控制帶功能在當過程值大于設定值,且偏差絕對值超過控制帶,則以輸出下限作為輸出值����。當過程值小于設定值�����,且偏差絕對值超過控制帶,則以輸出上限作為輸出值�����。如果偏差的絕對值小于控制帶,則以實際PID的計算結果作為輸出���。
死區(qū):
在控制系統(tǒng)中�����,執(zhí)行機構如果動作頻繁���,會導致小幅震蕩造成機械磨損,很多控制系統(tǒng)允許被控量在一定范圍內存在誤差���,該誤差稱為PID的死區(qū)���。
當過程值滿足如下公式時,SP –"死區(qū)寬度"< PV < SP "死區(qū)寬度"時���,PID停止調節(jié)保持輸出不變��。如下圖所示

②PID_Compact 指令組態(tài)
我們以最基本的恒壓供水系統(tǒng)�����,給大家說明如何組態(tài)(設置相關參數(shù))���。必須先添加循環(huán)中斷���,然后在循環(huán)中斷中添加 PID_Compact 指令。在循環(huán)中斷的屬性中�,可以修改其循環(huán)時間(如圖5)���。

圖5:添加循環(huán)中斷后在屬性界面修改其循環(huán)時間
這里解釋一下循環(huán)時間:PID控制器的采樣時間是循環(huán)中斷時間的整數(shù)倍����。如果我們自整定PID參數(shù)��,系統(tǒng)會自動計算sRet.r_Ctrl_Cycle(采樣時間)參數(shù)��。若用戶使用手動方式設定PID參數(shù)���,則一定要注意此參數(shù)為循環(huán)中斷時間的整數(shù)倍���。
例如:PID控制器的采樣時間是1s,循環(huán)中斷時間為100ms,則在1S的時間內����,循環(huán)中斷執(zhí)行了10次�����,但前9次PID控制器都不進行運算����。
1)在“指令 > 工藝 > PID 控制 > Compact PID> PID_Compact”下���,將 PID_Compact 指令添加至循環(huán)中斷��。如圖6所示
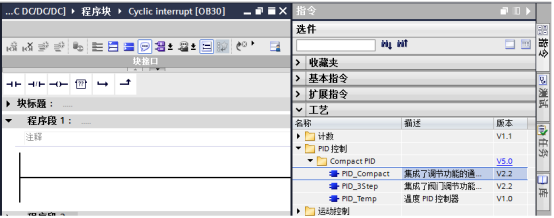
圖6在循環(huán)中斷中添加 PID_Compact 指令
2)當添加完 PID_Compact 指令后�,在項目樹 > 工藝對象文件夾中���,會自動關聯(lián)出 PID_Compact_x[DBx]�����,包含其組態(tài)界面和調試功能�����。如圖7所示
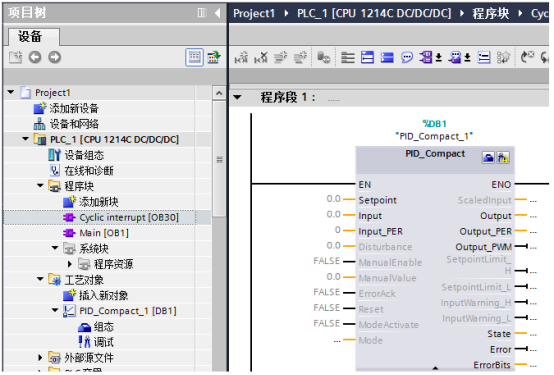
圖7工藝對象中關聯(lián)生成PID_Compact
3)使用 PID 控制器前�����,需要對其進行組態(tài)設置�,分為基本設置、過程值設置���、高級設置等部分�。如圖8
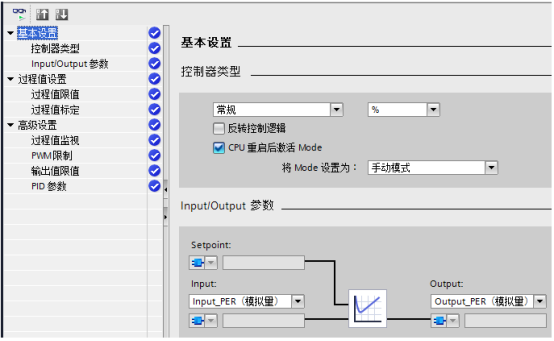
圖8 PID_Compact > 基本設置 > 控制器類型
第一:基本設置
1.1基本設置--控制器類型
a. 為設定值��、過程值和擾動變量選擇物理量和測量單位�����。我們使用的是恒壓控制��,所以選擇“壓力”即可�����。如圖9所示
b. 正作用:隨著 PID 控制器的偏差增大�,輸出值增大�。 反作用:隨著PID控制器的偏差增大,輸出值減小�。PID_Compact 反作用時,可以勾選“反轉控制邏輯”���。 如圖9所示
c. 要在 CPU 重啟后切換到“模式”(Mode) 參數(shù)中保存的工作模式�,請勾選“在 CPU 重啟后激活模式”。 如圖9所示
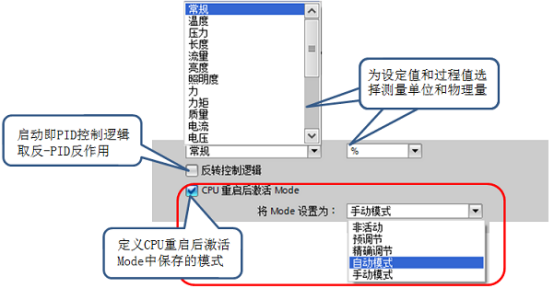
圖9 PID_Compact > 基本設置 > 控制器類型
1.2基本設置--定義 Input/Output 參數(shù)(如圖10)
定義 PID 過程值和輸出值的內容����,選擇 PID_Compact 輸入、輸出變量的引腳和數(shù)據(jù)類型�。選擇Input的話,那么就需要在程序中標定好工程單位值�����,然后標定好的工程量值填寫在PID_Compact管腳Input處����,Input處的管腳值與Setpoint管腳的值比較比較,從而控制輸出���。那到底是控制哪個輸出呢����?就是根據(jù)Output處選擇的參數(shù)��,可以是Output_PER��、Output、Output_PWM��。Output_PER就是直接通過模擬量的方式輸出控制外部設備�����,比如變頻器����、電機等,最終它的輸出值是在0-27648之間�,從而轉換成0-10V或者0-20mA,達到控制的結果。Output是百分比的方式輸出�,它介于0-100之間�����,如果需要控制外部設備的話����,需要用其他指令轉換輸出。Output_PWM是脈寬脈寬調制方式輸出數(shù)字量����。
那如果Input處選擇的是Input_PER,填寫的就是模擬量輸入通道的地址(比如IW64)���,這個地址會自動轉換成工程單位與Setpoint管腳的值比較。那它如何進行轉換的呢����?我們往下看

圖10 PID_Compact > 基本設置 > 定義 Input/Output
第二:過程值設置
1.1過程值設置--過程值限值(如圖11)
必須滿足過程值下限<過程值上限。如果過程值超出限值���,就會出現(xiàn)錯誤����。我們設置的是60hpa,因為我們的壓力傳感器是0-5Kpa的���,而量程中只用hpa這個單位�。所以我們轉換成hpa,并且設置留有余量�。
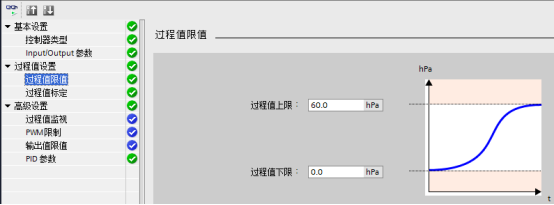
圖10 設置過程值限值
1.2過程值設置--過程值標定
a. 只有在“基本設置”項下 Input/Output 中輸入選擇為 “Input_PER” 時,才可組態(tài)過程值標定�。
b. 如果過程值與模擬量輸入值成正比,則將使用上下限值對來標定Input_PER�。
c. 必須滿足范圍的下限<上限。
由于我們“基本設置”項下 Input/Output 中輸入選擇為 “Input”所以圖11中“Input_PER”項為“已禁用”����。
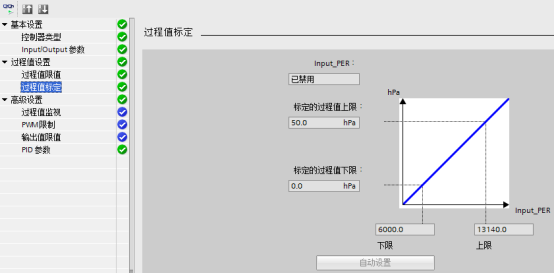
圖11進行過程值標定
高級設置
1.1高級設置--過程值監(jiān)視(如圖12及圖13)
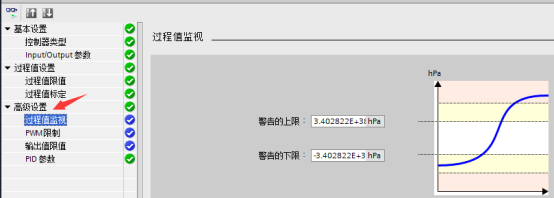
圖12
a. 過程值的監(jiān)視限值范圍需要在過程值限值范圍之內�。
b. 過程值超過監(jiān)視限值��,會輸出警告�����。過程值超過過程值限值���,PID輸出報錯����,切換工作模式�。

圖13
1.2.高級設置-- PWM 限制,在此不介紹����。
1.3高級設置--輸出值限值(如圖14)

圖14
a. 在“輸出值的限值”窗口中�����,以百分比形式組態(tài)輸出值的限值�����。 無論是在手動模式還是自動模式下,都不要超過輸出值的限值�����。
b. 手動模式下的設定值 ManualValue�,必須介于輸出值的下限 (Config.OutputLowerLimit) 與輸出值的上限 ( Config.OutputUpperLimit )之間的值。
c. 如果在手動模式下指定了一個超出限值范圍的輸出值���,則 CPU 會將有效值限制為組態(tài)的限值���。
d. PID_compact 可以通過組態(tài)界面中輸出值的上限和下限修改限值。最廣范圍為 -100.0 到 100.0�����,如果采用 Output_PWM 輸出時限制為 0.0 到 100.0 �。
1.4高級設置--對錯誤的響應(如圖15)
a.在 PID_Compact V2 時,可以預先設置錯誤響應時 PID 的輸出狀態(tài)����,如圖 13 所示。以便在發(fā)生錯誤時�����,控制器在大多數(shù)情況下均可保持激活狀態(tài)。
b. 如果控制器頻繁發(fā)生錯誤�,建議檢查 Errorbits 參數(shù)并消除錯誤原因。

圖15
根據(jù)錯誤代碼來分析錯誤原因�����。根據(jù)組態(tài)界面所設置的“對錯誤的響應”�����,不同錯誤的響應狀態(tài)也不一樣��,如下表所示:

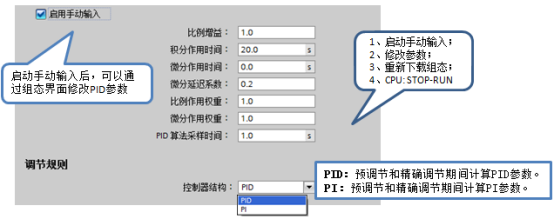
5.高級設置--手動輸入 PID 參數(shù)
a. 在 PID Compact 組態(tài)界面可以修改 PID 參數(shù)����,通過此處修改的參數(shù)對應工藝對象背景數(shù)據(jù)塊 > Static > Retain > PID 參數(shù)。
b. 通過組態(tài)界面修改參數(shù)需要重新下載組態(tài)并重啟 PLC���。建議直接對工藝對象背景數(shù)據(jù)塊進行操作����。
 技成工具箱
技成企業(yè)服務
技成工具箱
技成企業(yè)服務























