【實例】西門子實用定位控制程序案例
饒等
發(fā)布于2021-04-28 16:54
31
2
標(biāo)簽:西門子PLC,編程控制案例,PLC基礎(chǔ)
 【免費下載】電工仿真軟件_電工學(xué)習(xí)手冊_電工電子書
【免費下載】電工仿真軟件_電工學(xué)習(xí)手冊_電工電子書
【免費學(xué)習(xí)】PLC熱門課程_PLC初級_PLC基礎(chǔ)_PLC中高級_軟件安裝
【免費下載】PLC軟件下載_PLC軟件安裝教程_PLC手冊下載_PLC案例下載!
【免費學(xué)習(xí)】 變頻器精品課程_西門子PLC精品教程_三菱PLC精品教程!
今天我們分享一個常用的多點多速運動控制案例���,要求在HMI上能實現(xiàn)報警顯示�、手動�、自動控制;各段速度、位置的設(shè)定;IO表監(jiān)控等功能���。
具體控制要求是
?(1) HMI上面能夠?qū)崿F(xiàn)手動運行速度�����、點動速度的顯示;
?(2) HMI上能有手動����、自動控制畫面;并能顯示報警具體信息
?(3) HMI上能顯示當(dāng)前位置���、目標(biāo)位置、當(dāng)前速度�、目標(biāo)速度的顯示
?(4) HMI上能設(shè)置各段位置和速度
?(5) 當(dāng)在手動模式時,自動模式不能運行��,兩種模式需互鎖
?(6) 要求每次啟動時均在A 位置開始運行��,在沒有按下停止按鈕時�����,應(yīng)在ABC三點循環(huán)運行,可隨意更改三點位置值及運行速度
?(7) 當(dāng)按下停止按鈕時��,不能立即停止���,應(yīng)運行完該段位置才能停止
?(8) 當(dāng)按下急停按鈕時�����,電機(jī)應(yīng)立即停止
本例子采用200SMART ST20 CPU�,在看本案例時需要有一定的定位基礎(chǔ)知識��,能夠清楚步進(jìn)電機(jī)是如何進(jìn)行控制的���,是怎么去實現(xiàn)改變運行方向!并了解運動控制向?qū)Р僮?/span>
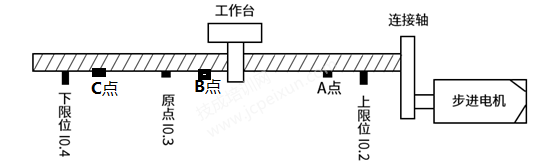
下圖是電機(jī)的示意圖;I0.2為正限位 I0.3為原點信號I0.4為負(fù)限位
HMI手動控制畫面顯示當(dāng)前位置�、點動速度����、手動運行速度及設(shè)置手動運行速度

自動控制畫面 顯示當(dāng)前位置和速度,目標(biāo)位置和速度�,使能指示
等

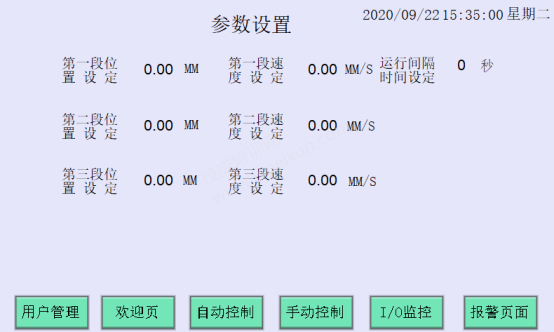
參數(shù)設(shè)置畫面可設(shè)置各段速度和位置
其他畫面不一一展示
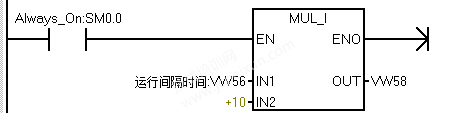
下面我們開始寫程序,首先應(yīng)該是軸使能以及初始化程序,但在編寫初始化程序之前�����,我們考慮在HMI方便運行間歇時間的設(shè)定�����,做了個時間數(shù)據(jù)的運算程序
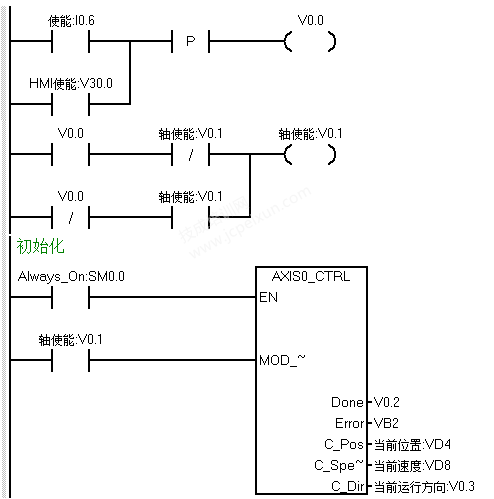
接著使用單按鈕的方式編寫軸使能程序 HMI及硬件按鈕均可使能
其次我們接著編寫手動部分的程序�����,手動運行正反轉(zhuǎn)時需要互鎖�,并且在自動模式時手動模式不能運行,所以用定位使能及自動運行兩個條做手動程序的EN位
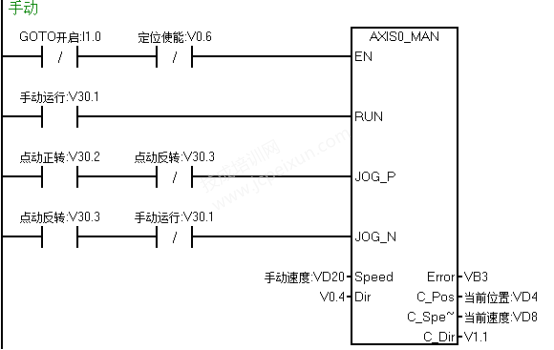
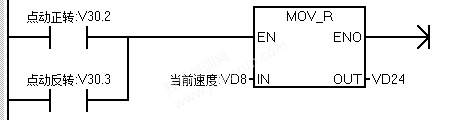
當(dāng)點動正轉(zhuǎn)或反轉(zhuǎn)時�����,我們把當(dāng)前速度傳送至HMI上顯示
執(zhí)行回原點程序
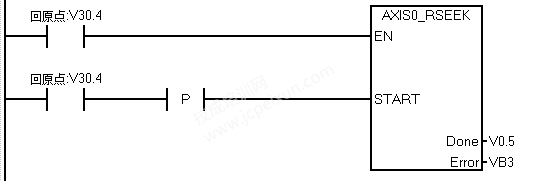
原點完成后把第一A點的位置和速度傳送至目標(biāo)位置和速度中

最后是自動部分的程序�,當(dāng)沒有急停的情況下��,按下啟動按鈕后�����,則開始執(zhí)行GOTO指令,開始運行依第一段速度運行至第一段位置
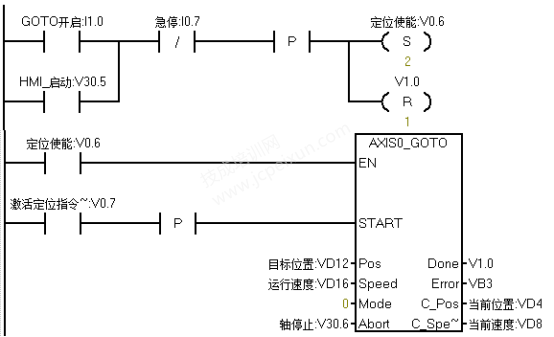
當(dāng)當(dāng)前位置和第一段A點位置相等時�����,把B點位置和速遞傳送至目標(biāo)值地址內(nèi)�,延時一定時間后,運行至B點��,當(dāng)?shù)竭_(dá)B點后把C點的位置和速度傳送至目標(biāo)位置地址
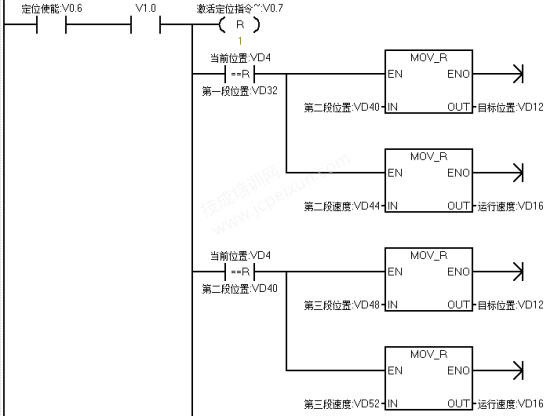
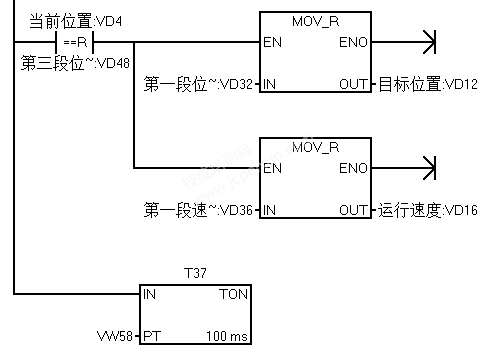
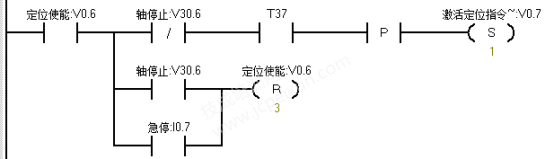
在沒按下停止時���,在ABC三處反復(fù)循運行;按下停止按鈕后�����,則不再運行下一段目標(biāo)值;按下急停按鈕時���,則需立即停止
以上整套程序,可把源文件給到大家���,軟件使用的是V2.5 版本�����。威綸通觸摸屏軟件是6.04
關(guān)于200SMART定位控制想進(jìn)一步學(xué)習(xí)的朋友�����,推薦大家查看曾老師的西門子《S7-200SMART定位控制應(yīng)用》《S7-200SMART高速脈沖輸入輸出功能介紹》兩門課程
課程由易到難�����,通俗易懂����、內(nèi)容精煉,帶你快速學(xué)會步進(jìn)伺服控制�。該課程從高速計數(shù)器的原理開始,逐步帶領(lǐng)大家高速計數(shù)和運動控制如何建立關(guān)系�,同時很詳細(xì)了介紹了運動控制的工作原理及向?qū)ЫM態(tài)、控制面板的使用等
(技成培訓(xùn)網(wǎng)原創(chuàng)���,作者:眭相建�,未經(jīng)授權(quán)不得轉(zhuǎn)載����,違者必究)
|

電工精品教程
立即掃碼免費學(xué)習(xí)
|

電工題庫寶典
立即掃碼免費下載
|

超全PLC學(xué)習(xí)資料包
立即掃碼免費下載
|

故障查詢小程序
立即掃碼免費使用
|
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























