西門子S7-200SMART如何畫圓
饒等
發(fā)布于2021-04-01 10:05
82
2
標(biāo)簽:編程軟件,西門子軟件,仿真軟件,軟件安裝
 【點(diǎn)擊領(lǐng)取】三菱案例 | 西門子案例 | 電工手冊 | 工具箱 軟件
【點(diǎn)擊領(lǐng)取】三菱案例 | 西門子案例 | 電工手冊 | 工具箱 軟件
【點(diǎn)擊獲取】三菱PLC例程117個|西門子PLC例程777個
【點(diǎn)擊下載】10款熱門電工仿真等軟件�����,免費(fèi)下載��!
一�����、 實(shí)驗設(shè)備介紹
(1) 西門子S7-200SMART系列PLC���,CPU型號為ST20���。
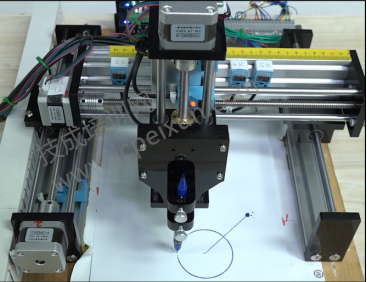
(2) XYZ軸平臺一套�,該平臺有三個步進(jìn)驅(qū)動器�,三套電機(jī)配合絲桿,在本例子因ST20型號的CPU只支持2軸高速脈沖輸出���,所以只驅(qū)動X軸和Y軸��。實(shí)驗平臺如下圖所示:
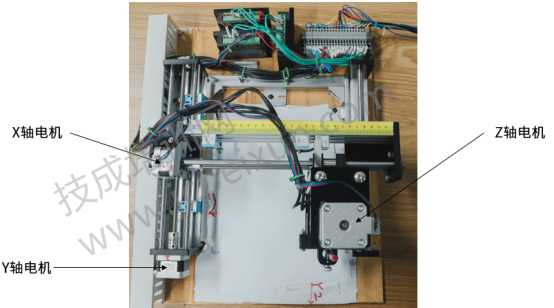
注:定義往電機(jī)方向移動為正方向��,絲桿的邏輯為4mm�����,步進(jìn)驅(qū)動的細(xì)分設(shè)置為3200個脈沖一轉(zhuǎn)���。
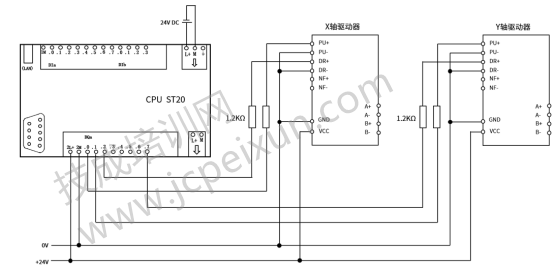
CPU輸出端Q0.0和Q0.2分半為X軸的脈沖和方向信號���,Q0.1和Q0.7位Y軸的脈沖和放信號,步進(jìn)驅(qū)動器有PLC的接線圖如下所示:
二�、 走圓軌跡算法說明
西門子S7-200SMART系列PLC不支持圓弧插補(bǔ)功能,所以需要自己根據(jù)算法進(jìn)行計算后分別驅(qū)動X軸和Y軸的移動從而來實(shí)現(xiàn)畫圓功能
要驅(qū)動XY軸畫圓����,可采用極限逼近法,把畫圓弧變成畫線段�,如下圖所示左側(cè)為六等分,角度a=30°����,右側(cè)為十二等分����,角度a=15°�����。
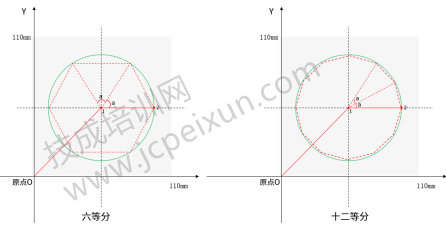
從上圖中可以看出�,當(dāng)?shù)冗叾噙呅蔚倪呍蕉鄷r,則多邊形的軌跡就越和圓相近���,所以當(dāng)角度a足夠小時�����,則得到的多邊形軌跡就越與圓接近����。
根據(jù)以上分析需要完成畫圓功能���,我們需要知道“圓心坐標(biāo)值”、“圓的半徑”�、“畫圓的速度”,然后根據(jù)分為三部分來實(shí)現(xiàn):
(1)畫筆移動到圓上
把XY軸分別回原點(diǎn)�,回原點(diǎn)后的位置默認(rèn)為XY平面坐標(biāo)的原點(diǎn)�,然后由原點(diǎn)移動到圓心坐標(biāo)���,如下圖所示1#點(diǎn)為圓心�����,2#點(diǎn)為圓上點(diǎn)。
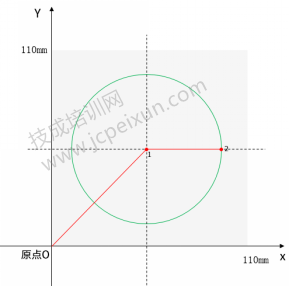
假設(shè)1#點(diǎn)的坐標(biāo)為(X1,Y1)����,速度為V,則X軸移動的距離為X1�,Y軸移動的距離為Y1。根據(jù)勾股定理可計算出原點(diǎn)到圓心的距離“Y(0→1)”�����、X軸移動速度“VXaxis”和Y軸移動速度“VYaxis” ���,計算公式如下所示:

當(dāng)畫筆到達(dá)1#點(diǎn)后���,然后Y軸不動,X軸以V的速度移動半徑R的距離到達(dá)圓上2#點(diǎn)位置�,假2#點(diǎn)的坐標(biāo)為(X2�����,Y2)
(2)畫筆開始畫圓
畫筆從2#點(diǎn)位置開始移動畫圓�����,假設(shè)下個圓上的點(diǎn)為3#點(diǎn)�����,坐標(biāo)為(X3,Y3)��,從圓心到3#點(diǎn)和從圓心到2#點(diǎn)的角度為a���,如下圖所示:
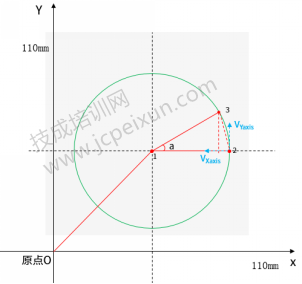
根據(jù)三角函數(shù)可計算出3#點(diǎn)的坐標(biāo)(X3,Y3)的值分別為:
X3=Cos(a)*R X1����,Y3=Sin(a)*R Y1
根據(jù)勾股定理可計算出XY軸要移動的距離 “Y(2→3)”的值。X軸移動速度“VXaxis”和Y軸移動速度“VYaxis” ��,計算公式如下所示:

注:此時X2和Y2為X軸和Y軸的當(dāng)前位置�,X3和Y3為X軸和Y軸要移動的目標(biāo)位置,速度需要取絕對值����。
同理:當(dāng)畫筆到達(dá)3#點(diǎn)后����,角度變?yōu)?a��,則對應(yīng)的圓上點(diǎn)為4#點(diǎn)����,坐標(biāo)為(X4,Y4)��,如下圖所示:
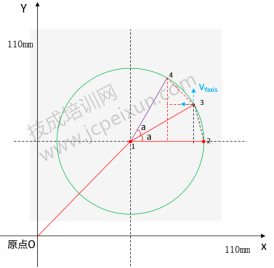
根據(jù)三角函數(shù)可計算出4#點(diǎn)的坐標(biāo)(X4�����,Y4)的值分別為:
X4=Cos(2a)*R X1����,Y4=Sin(2a)*R Y1
根據(jù)勾股定理可計算出XY軸要移動的距離 “Y(3→4)”的值。X軸移動速度“VXaxis”和Y軸移動速度“VYaxis” ����,計算公式如下所示:
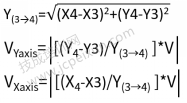
注:此時X3和Y3為X軸和Y軸的當(dāng)前位置,X4和Y4為X軸和Y軸要移動的目標(biāo)位置���,速度需要取絕對值��。
依次下去�,每走完一次后,角度自加一次���,當(dāng)角度值大于360°時����,則認(rèn)為畫圓完成�。
三、PLC程序設(shè)計
根據(jù)分析�,對于S7-200SMART系列PLC的程序設(shè)計主要分為“運(yùn)動向?qū)У慕M態(tài)配置”、“初始與會原點(diǎn)程序”���、“速度計算程序”����、“開始畫圓程序”
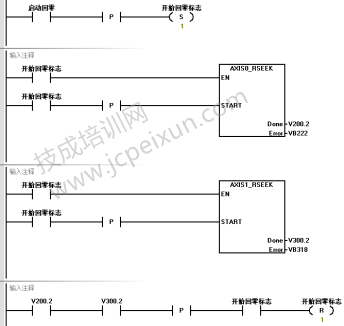
(1)初始化和回原點(diǎn)
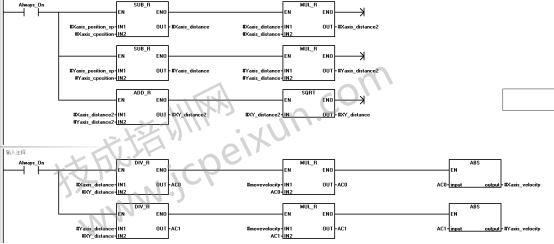
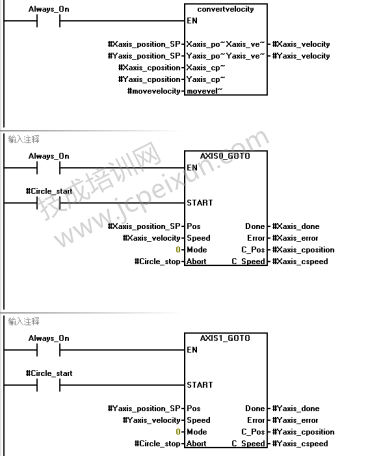
(2)速度換算程序
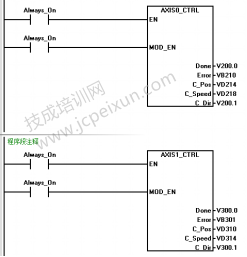
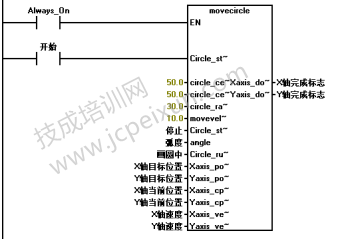
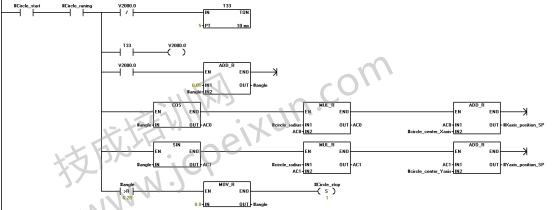
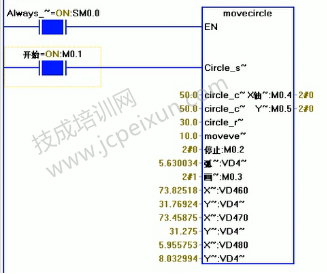
(3)畫圓程序
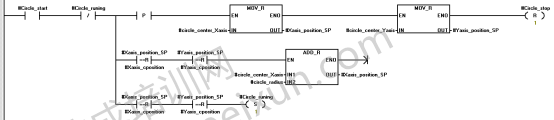
子程序內(nèi)部程序
四�、實(shí)驗效果展示
(技成培訓(xùn)網(wǎng)原創(chuàng),作者:曾鑫����,未經(jīng)授權(quán)不得轉(zhuǎn)載���,違者必究)

技成培訓(xùn)
微信公眾號:jcpeixun
|

技成電工課堂
微信公眾號:jcdgkt
|

學(xué)PLC聯(lián)盟
微信公眾號:jcpx006
|
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























