三菱FX5U PLC定位利用DOG搜索功能進(jìn)行原點(diǎn)回歸
吳翠萍
發(fā)布于2021-01-28 17:35
53
2
標(biāo)簽:三菱PLC,三菱 FX PLC,PLC編程入門(mén)
 【點(diǎn)擊領(lǐng)取】三菱案例 | 西門(mén)子案例 | 電工手冊(cè) | 工具箱 軟件
【點(diǎn)擊領(lǐng)取】三菱案例 | 西門(mén)子案例 | 電工手冊(cè) | 工具箱 軟件
【點(diǎn)擊獲取】三菱PLC例程117個(gè)|西門(mén)子PLC例程777個(gè)
【點(diǎn)擊下載】2020最新電工仿真軟件
導(dǎo)讀:在PLC控制定位系統(tǒng)中�,通常會(huì)用到相對(duì)定位、絕對(duì)定位��、表格定位����、原點(diǎn)回歸等功能,針對(duì)FX5U PLC可以使用正轉(zhuǎn)極限����、反轉(zhuǎn)極限,利用DOG搜索功能進(jìn)行原點(diǎn)回歸��。此時(shí)�,因原點(diǎn)回歸的開(kāi)始位置不同��,原點(diǎn)回歸動(dòng)作也各不同����。
那么今天我們就“原點(diǎn)回歸”這個(gè)問(wèn)題展開(kāi)探討��。
由圖1可以看出數(shù)字量輸入信號(hào)有4個(gè)���,分別是:正轉(zhuǎn)極限�����、反轉(zhuǎn)極限���、近點(diǎn)信號(hào)、原點(diǎn)信號(hào)�,這四個(gè)信號(hào)可以接入PLC中的X3、X2����、X1��、X0端子�����。原點(diǎn)回歸的速度和方向都可以通過(guò)程序進(jìn)行設(shè)置。
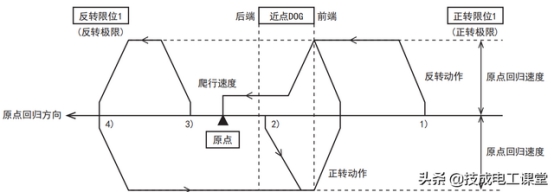
圖1
針對(duì)原點(diǎn)回歸開(kāi)始位置不同����,原點(diǎn)回歸分為以下4種情況:
1) 開(kāi)始位置在通過(guò)近點(diǎn)DOG前的時(shí)候
1. 通過(guò)執(zhí)行DSZR/DDSZR指令,開(kāi)始原點(diǎn)回歸動(dòng)作�����。
2. 以原點(diǎn)回歸速度�����,向原點(diǎn)回歸方向開(kāi)始移動(dòng)��。
3. 一旦檢測(cè)出近點(diǎn)DOG的前端��,就開(kāi)始減速到爬行速度�����。
4. 檢測(cè)出近點(diǎn)DOG的后端后�,在檢測(cè)出指定次數(shù)的零點(diǎn)信號(hào)時(shí)停止。
2)開(kāi)始位置在近點(diǎn)DOG里面的時(shí)候
1. 通過(guò)執(zhí)行DSZR/DDSZR指令,開(kāi)始原點(diǎn)回歸動(dòng)作
2. 以原點(diǎn)回歸速度�����,向與原點(diǎn)回歸方向相反的方向開(kāi)始移動(dòng)�����。
3. 一旦檢測(cè)出近點(diǎn)DOG的前端���,就進(jìn)行減速停止����。(離開(kāi)近點(diǎn)DOG�。)
4. 以原點(diǎn)回歸速度,向原點(diǎn)回歸方向開(kāi)始移動(dòng)�����。(再次進(jìn)入近點(diǎn)DOG�����。)
5. 一旦檢測(cè)出近點(diǎn)DOG的前端��,就開(kāi)始減速到爬行速度��。
6. 檢測(cè)出近點(diǎn)DOG的后端后�����,在檢測(cè)出指定次數(shù)的零點(diǎn)信號(hào)時(shí)停止���。
3)開(kāi)始位置在通過(guò)近點(diǎn)DOG后的時(shí)候
1. 通過(guò)執(zhí)行DSZR/DDSZR指令����,開(kāi)始原點(diǎn)回歸動(dòng)作��。
2. 以原點(diǎn)回歸速度���,向原點(diǎn)回歸方向開(kāi)始移動(dòng)�。
3. 檢測(cè)出反轉(zhuǎn)限位1(反轉(zhuǎn)極限)時(shí)減速停止����。
4. 以原點(diǎn)回歸速度,向與原點(diǎn)回歸方向相反的方向開(kāi)始移動(dòng)����。
5. 一旦檢測(cè)出近點(diǎn)DOG的前端,就進(jìn)行減速停止。(檢測(cè)出(離開(kāi))近點(diǎn)DOG�����。)
6. 以原點(diǎn)回歸速度�����,向原點(diǎn)回歸方向開(kāi)始移動(dòng)�。(再次進(jìn)入近點(diǎn)DOG。)
7. 一旦檢測(cè)出近點(diǎn)DOG的前端��,就開(kāi)始減速到爬行速度����。
8. 檢測(cè)出近點(diǎn)DOG的后端后,在檢測(cè)出指定次數(shù)的零點(diǎn)信號(hào)時(shí)停止����。
4)開(kāi)始位置的原點(diǎn)回歸方向的限位開(kāi)關(guān)(反轉(zhuǎn)限位1)為ON的時(shí)候
1. 通過(guò)執(zhí)行DSZR/DDSZR指令,開(kāi)始原點(diǎn)回歸動(dòng)作���。
2. 以原點(diǎn)回歸速度�,向與原點(diǎn)回歸方向相反的方向開(kāi)始移動(dòng)�。
3. 一旦檢測(cè)出近點(diǎn)DOG的前端�����,就進(jìn)行減速停止�。(檢測(cè)出(離開(kāi))近點(diǎn)DOG�。)
4. 以原點(diǎn)回歸速度���,向原點(diǎn)回歸方向開(kāi)始移動(dòng)���。(再次進(jìn)入近點(diǎn)DOG。)
5. 一旦檢測(cè)出近點(diǎn)DOG的前端�����,就開(kāi)始減速到爬行速度���。
6. 檢測(cè)出近點(diǎn)DOG的后端后�,在檢測(cè)出指定次數(shù)的零點(diǎn)信號(hào)時(shí)停止��。
注意:將近點(diǎn)DOG信號(hào)和零點(diǎn)信號(hào)指定為同一軟元件�����,當(dāng)原點(diǎn)回歸零點(diǎn)信號(hào)數(shù)為1時(shí),原點(diǎn)回歸結(jié)束時(shí)的停止方法不是檢測(cè)出零點(diǎn)信號(hào)���,而是檢測(cè)出近點(diǎn)DOG信號(hào)����。
此外���,關(guān)于零點(diǎn)信號(hào)計(jì)數(shù)開(kāi)始時(shí)間的設(shè)定�����,在近點(diǎn)DOG前端時(shí)���,設(shè)定為從檢測(cè)出近點(diǎn)DOG信號(hào)時(shí)開(kāi)始對(duì)零點(diǎn)信號(hào)進(jìn)行計(jì)數(shù)。
程序舉例分3步:(1.原點(diǎn)回歸動(dòng)作描述 2.軟件中參數(shù)設(shè)置 3.編寫(xiě)程序)
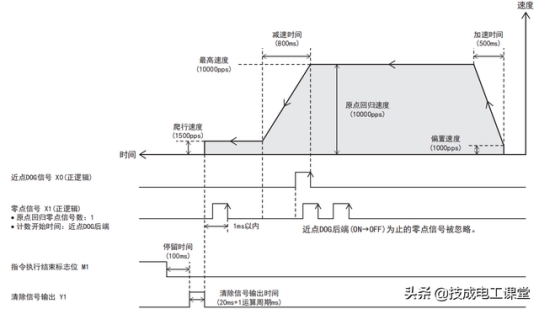
原點(diǎn)回歸動(dòng)作
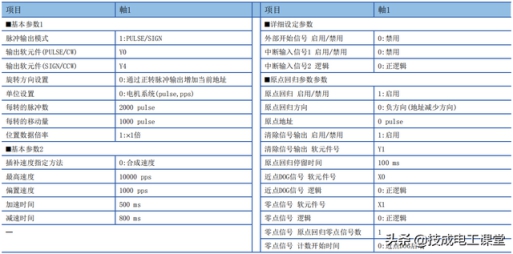
軟件中參數(shù)設(shè)置
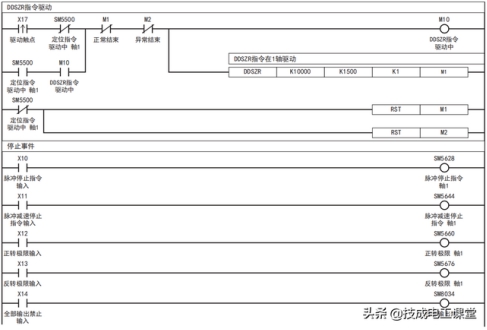
程序編寫(xiě)
結(jié)束語(yǔ):關(guān)于三菱FX5UPLC中利用DOG搜索功能進(jìn)行原點(diǎn)回歸的問(wèn)題就和大家探討到這里了����。在實(shí)際定位回參考點(diǎn)的時(shí)候一定要分析不同的情況才能讓設(shè)備更加準(zhǔn)確地回到原點(diǎn)。
技成培訓(xùn)網(wǎng)原創(chuàng)�,作者:郭彪,未經(jīng)授權(quán)不得轉(zhuǎn)載���,違者必究~

技成培訓(xùn)
微信公眾號(hào):jcpeixun
|

技成電工課堂
微信公眾號(hào):jcdgkt
|

學(xué)PLC聯(lián)盟
微信公眾號(hào):jcpx006
|
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























