案例 | 械手和傳送帶并行執(zhí)行的順序控制
吳翠萍
發(fā)布于2020-08-05 16:04
23
2
標(biāo)簽:三菱PLC,PLC案例
 【點(diǎn)擊領(lǐng)取】三菱案例 | 西門子案例 | 電工手冊(cè) | 工具箱 軟件
【點(diǎn)擊領(lǐng)取】三菱案例 | 西門子案例 | 電工手冊(cè) | 工具箱 軟件
【點(diǎn)擊獲取】三菱PLC例程117個(gè)|西門子PLC例程777個(gè)
【點(diǎn)擊下載】2020新電工仿真軟件
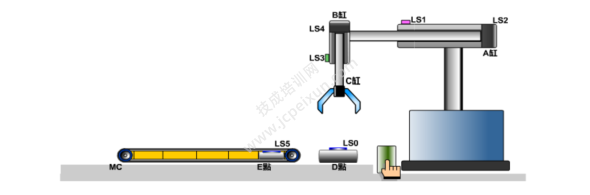
今天技成培訓(xùn)網(wǎng)給大家講解一個(gè)步進(jìn)順序控制的案例�,機(jī)械手控制系統(tǒng),這個(gè)系統(tǒng)并不是簡(jiǎn)單的只有機(jī)械手動(dòng)作的單流程結(jié)構(gòu)�����,而是機(jī)械手和傳送帶并行執(zhí)行的結(jié)構(gòu)����,我們稱之為并行性分支流程結(jié)構(gòu)。
其實(shí)該控制系統(tǒng)是利用機(jī)械手臂搬運(yùn)工件�����,傳送帶傳送工件����。
控制要求如下:
1、工件的補(bǔ)充使用人工控制���,可直接將工件放在D點(diǎn)(LS0動(dòng)作)����。
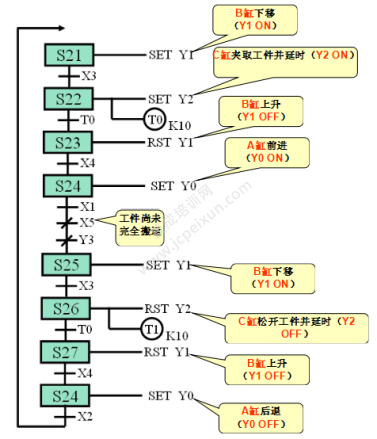
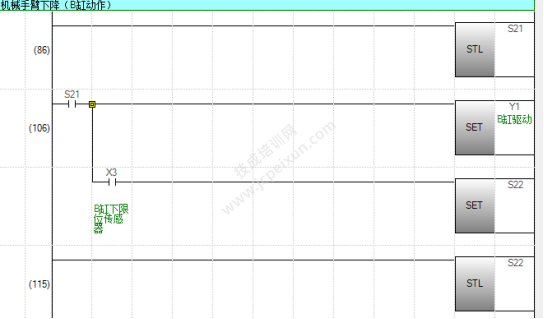
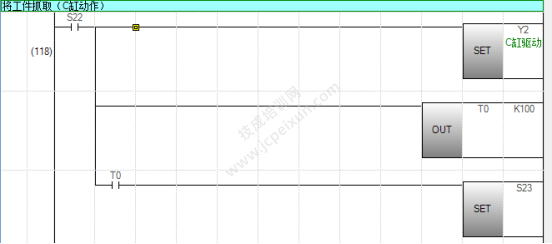
2、只要D點(diǎn)有工件���,機(jī)械手臂即先下降(B缸動(dòng)作)將工件抓取(C缸動(dòng)作)后上升(B缸復(fù)位)�����,再將工件搬運(yùn)(A缸動(dòng)作)到E點(diǎn)上方��,機(jī)械手臂再次下降(B缸動(dòng)作)后放開(C缸復(fù)位)工件����,機(jī)械手臂上升(B缸復(fù)位)����,后機(jī)械手臂再回到原點(diǎn)(A缸復(fù)位)。
3���、A,B,C缸均為單作用氣缸�����,使用電磁控制�����。C缸在抓取或放開工件后��,都需有1秒的間隔����,機(jī)械手臂才能動(dòng)作�����。
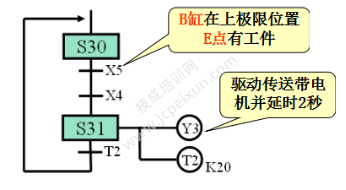
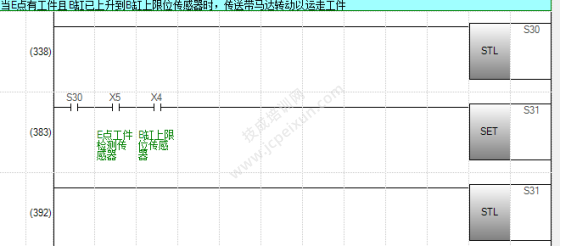
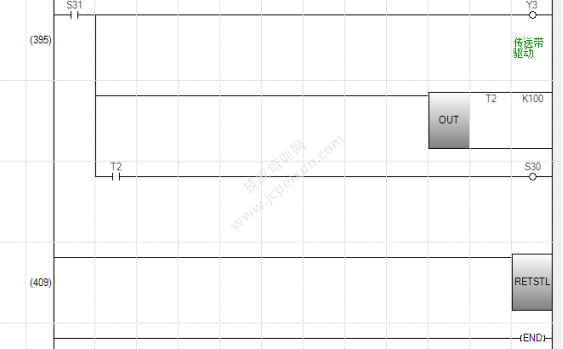
4�����、當(dāng)E點(diǎn)有工件且B缸已上升到LS4時(shí)���,傳送帶馬達(dá)轉(zhuǎn)動(dòng)以運(yùn)走工件��,經(jīng)2秒后傳送帶馬達(dá)自動(dòng)停止����。工件若未完全運(yùn)走(計(jì)時(shí)未到)時(shí)�����,則應(yīng)等待傳送帶馬達(dá)停止后才能將工件移走。
我們首先對(duì)機(jī)械手控制系統(tǒng)的控制功能進(jìn)行分析��。
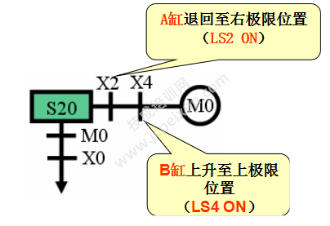
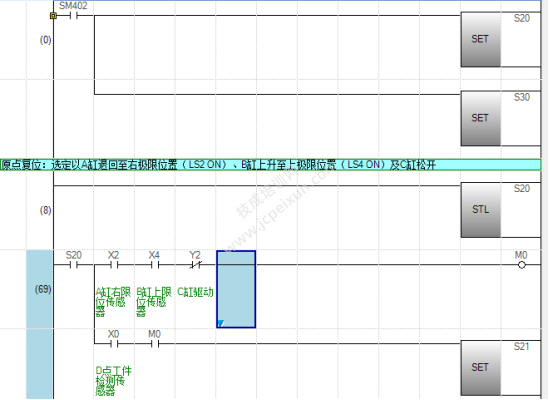
1���、原點(diǎn)復(fù)位:選定以A缸退回至右極限位置(LS2 ON)�����、B缸上升至上極限位置(LS4 ON)及C缸松開為機(jī)械手臂的原點(diǎn)���。執(zhí)行一個(gè)動(dòng)作之后,應(yīng)做原點(diǎn)復(fù)位的偵測(cè)(因?yàn)锳����、B、C缸均為單作用氣缸�����,所以會(huì)自動(dòng)退回原點(diǎn))��。
2��、工件搬運(yùn)流程:動(dòng)作為循環(huán)式單流程結(jié)構(gòu)。
3�����、傳送帶流程:在檢測(cè)到E點(diǎn)有工件��,且B缸在上極限位置時(shí)�,應(yīng)驅(qū)動(dòng)傳送帶轉(zhuǎn)動(dòng)����。
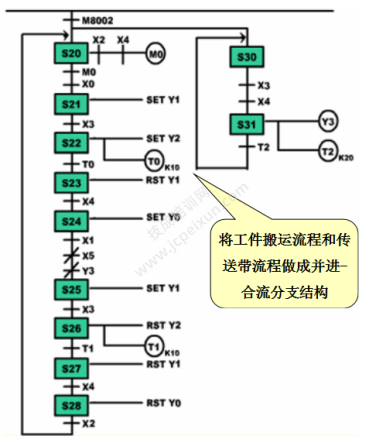
4、工件搬運(yùn)和傳送帶兩個(gè)流程可以同時(shí)進(jìn)行��,使用并行性分支流程來完成�。
我們?cè)趯?duì)控制功能分析之后,然后對(duì)機(jī)械手控制系統(tǒng)進(jìn)行IO分配���。

接著是根據(jù)機(jī)械手控制系統(tǒng)的流程規(guī)律和轉(zhuǎn)移條件����,繪制順序功能圖�。
1、原點(diǎn)復(fù)位流程
2����、工件搬運(yùn)流程
3����、傳送帶流程
我們將以上的分流程的順序功能圖合并起來��,組合成如下的順序功能圖�����。
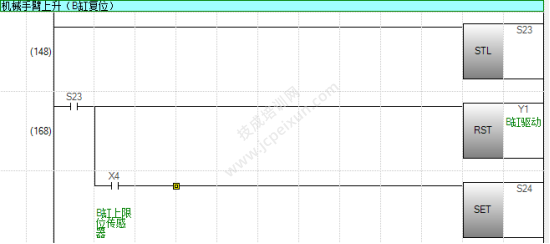
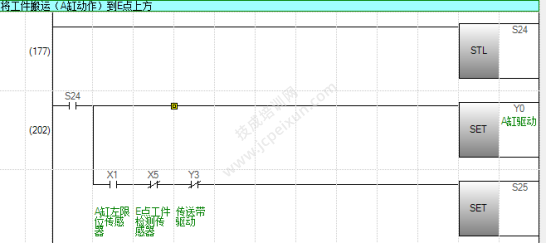
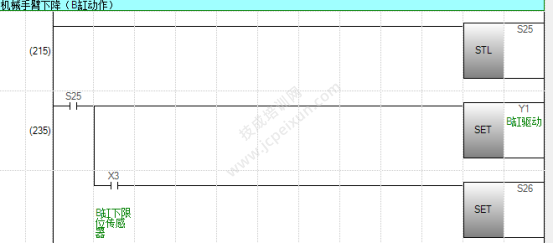
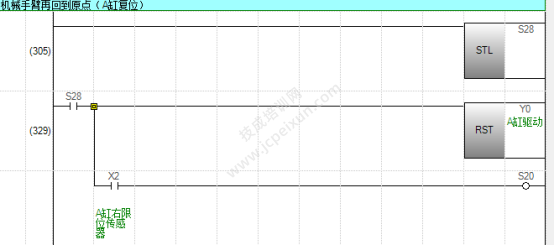
后�����,我們根據(jù)繪制好的順序功能圖編寫出步進(jìn)指令梯形圖程序就可以了�。
程序是以FX5U PLC為例,以GX WORKS3軟件編寫的�����。具體程序如下:


看完之后是不是忍不住想要?jiǎng)邮挚纯茨?本次案例拆解就到這里了����,喜歡就趕緊收藏,自己動(dòng)手吧!
(技成培訓(xùn)原創(chuàng)�����,作者:蔡慧滎,未經(jīng)授權(quán)不得轉(zhuǎn)載����,違者必究!)

技成培訓(xùn)
微信公眾號(hào):jcpeixun
|

技成電工課堂
微信公眾號(hào):jcdgkt
|

技成PLC課堂
微信公眾號(hào):jc-plc
|
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























