一、動(dòng)作描述
1. 分別介紹各個(gè)定位指令的使用規(guī)則�����;
2. 使用定位指令控制伺服步進(jìn)�����,(以脈沖加方向的方式)����;
3. M8029應(yīng)用注意事項(xiàng)。
二��、硬件設(shè)備
1. 三菱PLC :FX3U-32MT
2. 步進(jìn)電機(jī)和步進(jìn)驅(qū)動(dòng)器各一臺(tái)
三����、軟件
三菱編程軟件:GX Works2/ GX Works3

四�、指令的介紹
首先使用輸出高速脈沖位置控制時(shí)�,控制需要理解三個(gè)概念:
1、位置移動(dòng)速度(脈沖頻率�,每秒發(fā)送多少個(gè)脈沖)
2、位置移動(dòng)距離(脈沖數(shù)量�����,脈沖數(shù)量對應(yīng)滑臺(tái)的距離)
3�、位置移動(dòng)方向(方向輸出或雙向脈沖,控制電機(jī)前進(jìn)或者后退)
1 PLSY
16位運(yùn)算指令PLSY,從輸出Y(D)·中輸出(S1)·個(gè)數(shù)頻率為(S2)·的脈沖串��。

S1中指定頻率�����。允許設(shè)定范圍:1~32767(Hz)
S2中指定發(fā)出的脈沖量���,允許設(shè)定范圍:1~32767(PLS)
32位運(yùn)算指令DPLSY
輸出D中輸出[S1· 1、S1]個(gè)數(shù)頻率為[S2 1�����、S2]的脈沖串。

在[S1 1���、S1]中指定頻率���,使用高速輸出特殊適配器時(shí),允許設(shè)定范圍:1~200,000(Hz)
在使用FX3G·FX3U·FX3UC本體PLC時(shí)�,允許設(shè)定范圍: 1~100,000(Hz)
在[S2 1、S2]中指定發(fā)出的脈沖量���,允許設(shè)定范圍:1~2,147,483,647(PLS)
在指令中指定有脈沖輸出的Y編號�����,允許設(shè)定范圍:Y000�、Y001 �����、Y002����、Y003
絕對位置當(dāng)前值數(shù)據(jù)寄存器
1、當(dāng)前值是以原點(diǎn)為參考點(diǎn)的絕對地址值����。工件移動(dòng)時(shí)其數(shù)值隨工件移動(dòng)而變化����。其數(shù)值表示工件當(dāng)前位置���。
2��、當(dāng)PLC斷電時(shí)���,當(dāng)前值寄存器的當(dāng)前值就會(huì)被清除而變0。
3���、對不同系列的PLC���,對應(yīng)不同的脈沖輸出口���,當(dāng)前值寄存器的編號是不同的�。
4��、當(dāng)驅(qū)動(dòng)條件成立時(shí)���,執(zhí)行PLSY指令�����,從輸出口(Y0\Y1\Y2)輸出一個(gè)頻率為S1���,脈沖個(gè)數(shù)為S2��,占空比為50%的脈沖串�,作定位控制命令用時(shí)�����,需要指定方向輸出口Y����,PLSY沒有加減速時(shí)間設(shè)置,定位容易丟失脈沖或者過沖�����。
5���、PLSY指令驅(qū)動(dòng)后��,采用中斷方式輸出脈沖串�,因此不受掃描周期影響。如果在執(zhí)行過程中指令驅(qū)動(dòng)條件斷并�����,輸出馬上停止�,再次驅(qū)動(dòng)后,又會(huì)從最初開始輸出���。該指令一般用來控制伺服或者步進(jìn)電機(jī)的手動(dòng)運(yùn)行�����。
6��、把指令中脈沖個(gè)數(shù)設(shè)置為K0���,則指令的功能變?yōu)檩敵鰺o數(shù)個(gè)脈沖串,如下圖1����,圖2為對應(yīng)的特殊軟原件�����。
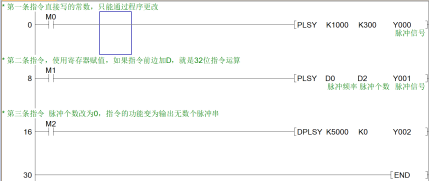
圖1

圖2
2 PLSV

S 輸出脈沖頻率或其存儲(chǔ)地址
D1 指定脈沖串輸出口,Y0或Y1指定旋轉(zhuǎn)方向的輸出端口����,
D2 指定旋轉(zhuǎn)方向的輸出端口,ON:正轉(zhuǎn),OFF:反轉(zhuǎn)��。
指令前面加D��,就是32位指令���。
當(dāng)驅(qū)動(dòng)條件成立時(shí)���,從輸出口D1輸出頻率為S的脈沖串。電機(jī)轉(zhuǎn)向信號由D2口輸出����,如S為正值,則D2輸出為ON��,電機(jī)正轉(zhuǎn)����。如S為負(fù)值��,則D2輸出為OFF����,電機(jī)反轉(zhuǎn)��。
1�、 在脈沖輸出過程中,如果將S變?yōu)镵0���,則脈沖輸出會(huì)馬上停止���。同樣,如果驅(qū)動(dòng)條件在脈沖輸出過程中斷開,則輸出馬上停止����。
2、 PLSV指令為可隨時(shí)改變脈沖的頻率�,但在脈沖輸出過程中,最好不要改變輸出脈沖的方向(即由正頻率變?yōu)樨?fù)頻率或相反)。如果要變更方向��,可先將輸出頻率設(shè)為K0,并設(shè)定電機(jī)充分停止時(shí)間����,再輸出不同方向的頻率值。
3����、 PLSV指令的缺點(diǎn)是在開始,頻率變化和停止時(shí)均沒有加減速動(dòng)作���。這就影響了指令的使用�,因此���,常常把PLSV指令和斜坡指令RAMP配合使用,利用斜坡指令RAMP的遞增�,遞減速功能來實(shí)現(xiàn)PLSV指令的加�����,減速��。
4�����、 PLSV指令的缺點(diǎn)是在開始�����,頻率變化和停止時(shí)均沒有加減速動(dòng)作。這就影響了指令的使用���,因此�����,常常把'PLSV指令和斜坡指令RAMP配合使用,利用斜坡指令RAMP的遞增��,遞減速功能來實(shí)現(xiàn)PLSV指令的加�����,減速��。正常不做定位指令使用�。
3 PLSR
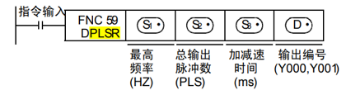

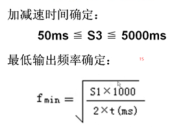
1�、 當(dāng)驅(qū)動(dòng)條件成立時(shí),從輸出口D輸出最高頻率為S1��,脈沖個(gè)數(shù)為S2����,加減速時(shí)間為S3����,占空比為50%的脈沖串���。加減速時(shí)間不能分開控制��,PLSR脈沖指令以一定的頻率發(fā)出目標(biāo)值個(gè)脈沖,在指令中可以設(shè)置脈沖頻率����、脈沖總數(shù)、和發(fā)出脈沖的輸出點(diǎn)��;但只能控制脈沖��,如果是脈沖加方向的脈沖模式��,那方向點(diǎn)要另選一個(gè)普通開關(guān)點(diǎn)另外控制���。方向信號先于脈沖指令給定�。
頻率和脈沖數(shù)設(shè)定
2�����、 輸出頻率S1的設(shè)定范圍是[(FX2N)10~20000HZ] [(FX1S)10~100000HZ],頻率設(shè)定必須是10的整數(shù)倍��。2�����、輸出脈沖數(shù)的設(shè)定范圍是:16位運(yùn)算為110~32767��,32位運(yùn)算為110~2147486947����。當(dāng)設(shè)定值不滿110時(shí),脈沖不能正常輸出��。
3�、 M8029:脈沖發(fā)完后,M8029閉合�����。當(dāng)M0斷開后����,M8029自動(dòng)斷開。
4���、 M8147:Y0輸出脈沖時(shí)閉合�����,發(fā)完后脈沖自動(dòng)斷開,用下降沿觸發(fā)轉(zhuǎn)下一步���;
5�、 M8148:Y1輸出脈沖時(shí)閉合���,發(fā)完后脈沖自動(dòng)斷開,用下降沿觸發(fā)轉(zhuǎn)下一步����;
6、 M8149:Y2輸出脈沖時(shí)閉合����,發(fā)完后脈沖自動(dòng)斷開,用下降沿觸發(fā)轉(zhuǎn)下一步�����;
7����、 D8140:記錄Y0輸出的脈沖總數(shù),32位寄存器
8�����、 D8142:記錄Y1輸出的脈沖總數(shù),32位寄存器
9��、 D8136:記錄Y0和Y1輸出的脈沖總數(shù),32位寄存器 (針對FX1S)
4 DRVA

S1 目標(biāo)的絕對位置脈沖量
S2 輸出脈沖頻率
D1 輸出脈沖端口�,僅能Y0或Y1
D2. 指定旋轉(zhuǎn)方向的輸出端口,ON:正轉(zhuǎn)��,OFF:反轉(zhuǎn)
當(dāng)驅(qū)動(dòng)條件成立時(shí)��,輸出口D1發(fā)出定位脈沖���,電機(jī)以轉(zhuǎn)速S2轉(zhuǎn)動(dòng)到位置為絕對位置值S1處��。轉(zhuǎn)向由S1與當(dāng)前位置值比較確定�����,S1大于當(dāng)前值時(shí)���,D2為ON,電機(jī)正轉(zhuǎn);當(dāng)S1小于當(dāng)前值時(shí)����,D2為OFF��,電機(jī)反轉(zhuǎn)�����。
與DRVI指令相同
1�����、指令格式相同
2�、特殊軟元件相同
3��、速度與位置參數(shù)相同
4����、運(yùn)行時(shí)序相同
5�、電機(jī)的轉(zhuǎn)向信號都是指令自動(dòng)完成
與DRVI指令不同
目標(biāo)位置表示不同
DRVI是用于相對于當(dāng)前位置的移動(dòng)量來表示目標(biāo)位置,而DRVA是用相對于原點(diǎn)的絕對位置值來表示目標(biāo)位置���。
指令中所指定的脈沖數(shù)量不同
DRVI指令中所指定的脈沖數(shù)量就是PLC輸出的數(shù)量���。而DRVA指令中所指定的數(shù)量不是PLC實(shí)際發(fā)出脈沖的數(shù)量�����。其實(shí)際輸出脈沖數(shù)是與指令驅(qū)動(dòng)前當(dāng)前值相運(yùn)算的結(jié)果���。
暫停再驅(qū)動(dòng)效果不同
DRVI指令暫停后再驅(qū)動(dòng)不能繼續(xù)原來的運(yùn)行,而DRVA指令暫停后再驅(qū)動(dòng)可以繼續(xù)原來的運(yùn)行���。
5 DRVI

S1 輸出脈沖量(位置移動(dòng)距離)
S2 輸出脈沖頻率(位置移動(dòng)速度)
D1 輸出脈沖端口�,僅能Y0或Y1
D2 指定旋轉(zhuǎn)方向的輸出端口(位置移動(dòng)方向), ON:正轉(zhuǎn)����,OFF:反轉(zhuǎn).
相對定位,相對位移是指移位后位置坐標(biāo)與當(dāng)前位置坐標(biāo)的位移量��。
位置控制三要素
1����、位置移動(dòng)方向(電機(jī)轉(zhuǎn)動(dòng)方向)
2、位置移動(dòng)速度(電機(jī)轉(zhuǎn)速)
3�、位置移動(dòng)距離(相對或絕對)
當(dāng)驅(qū)動(dòng)條件成立時(shí),輸出口D1發(fā)出定位脈沖�����,電機(jī)以轉(zhuǎn)速S2轉(zhuǎn)動(dòng)S1個(gè)脈沖數(shù)。轉(zhuǎn)向由S1的正�����、負(fù)確定���。S1為正���,D2為ON,電機(jī)正轉(zhuǎn);S1為負(fù)�,D2為OFF,電機(jī)反轉(zhuǎn)����。
最高速度
電機(jī)運(yùn)行時(shí)出最高速度,電機(jī)實(shí)際運(yùn)行速度必須小于該值���。
最高速度存于寄存器
若有收獲,就點(diǎn)個(gè)贊吧���!
 技成工具箱
技成企業(yè)服務(wù)
技成工具箱
技成企業(yè)服務(wù)























